被动控制水箱的水平
在这个例子中,您将了解如何使用控制系统调谐器应用程序设计一个控制器非线性植物建模仿真软件®。金宝app你完成以下任务:
为补偿器优化配置模型和应用
优化使用passivity-based一阶补偿器的设计
模拟闭环非线性响应。
金宝app模型的控制系统模型
的cst_watertank_comp_design模型、模型的反馈回路调节水箱中的水位。控制器块包含一阶补偿器调谐。
mdl =“cst_watertank_comp_design”;open_system (mdl)

水箱子系统水箱动力学模型。进入水箱的最高速度与电压成正比,V,应用于泵。叶子通过开放水箱基础速度的平方根成正比水高度,H,在坦克。根在水中的存在流量非线性使得工厂。

水流的非线性模型


在哪里
 表示在水箱的高度
表示在水箱的高度 表示电压应用于泵
表示电压应用于泵 表示槽的横截面积
表示槽的横截面积 和
和 是常数与流量的坦克吗
是常数与流量的坦克吗





这个系统是被动的和存储功能 自
自

Passivity-Based控制
被动的定理,两个严格被动的负反馈互连系统 和
和 总是稳定的。
总是稳定的。

自水箱系统是被动的,是有道理的,要求严格被动控制器,保证闭环稳定性即使植物模型是不准确的。
补偿器使用控制系统调谐器调整
您可以使用控制系统调谐器应用优化控制器。
第一步:打开控制系统调谐器在仿真软件模型窗口,应用金宝app程序。应用程序选项卡,应用程序画廊,点击控制系统调谐器。
第二步:启动调整块的选择器选择模块按钮调优选项卡

步骤3:选择控制器的块并单击OK。现在这一块出现在调谐块列表。

第四步:指定优化目标。在这里,有两个主要目标:
跟踪步骤水位的变化
使控制器被动
单击新目标下拉列表,添加一个被动的目标。

配置这个目标只适用于控制器的块。这是通过设置输入信号是“预期水位”,将输出信号控制器的输出块,和循环打开控制器输出块。同时指定最小被动指数为0.01输入和输出执行严格的被动。

接下来,添加一个参考跟踪的目标的新目标下拉列表。配置这个目标1秒的响应时间。

最后,单击管理的目标按钮的调优选项卡和被动目标标记为硬调优约束。

第五步:您准备优化控制器。点击调整按钮。您可以查看并排通过选择优化的结果左/右在视图选项卡。

您可以进一步分析这些结果通过生成一个MATLAB脚本,再现了这个优化过程。

闭环仿真
您可以查看的波德图调整控制器。点击新的剧情按钮的控制系统选项卡。选择新波德从下拉列表中。

控制器响应可以指定如下。

点击情节按钮。波德图如下图所示。

你也可以模拟调整控制器的闭环非线性响应。首先,更新控制器块通过点击更新模块在控制系统选项卡。

块范围在仿真软金宝app件模型中,双击打开窗口范围,然后模拟模型。
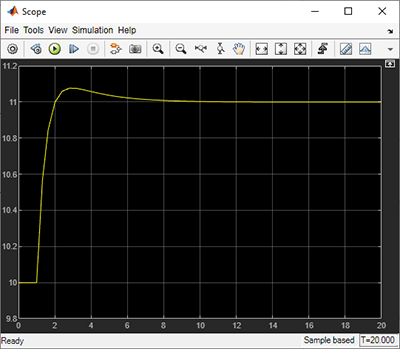
调整控制系统的非线性响应出现在窗口范围。这个模拟表明,该跟踪性能令人满意。