车道改变参考发生器
描述
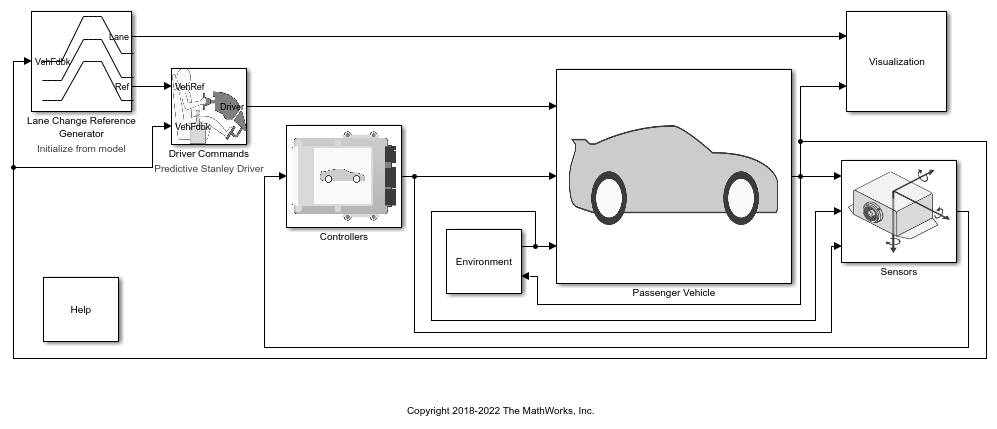
的车道改变参考发生器块设置的参数配置double-lane改变策略。
车辆到达参考速度后,命令一个零块加速度信号,产生一个横向参考轨迹作为纵向位移的函数。块还生成信号指示左和右车道边界作为轴宽度的函数。
使用稳定状态的初始条件参数指定操作的初始条件。默认情况下,参数设置从模型初始化与车辆静止,仿真开始在指定的初始位置。如果你想启动模拟零稳态速度:
集稳定状态的初始条件来
解决使用块参数。在稳态解算器选项卡中,指定初始条件,工作空间变量,求解器设置。点击产生稳态解。
仿真完成之后,集稳定状态的初始条件来
恢复从一个工作空间变量。集从稳态解,ssVar在步骤2中指定工作空间变量。
运行仿真。
例如,看到的开始Double-Lane变化机动目标速度。
例子
港口
输入
输出
参数
版本历史
介绍了R2019a