在本视频中,我们将看到如何使用电机控制模块对无刷PMSM电机进行仪器测试,以快速估计电机参数,我们可以使用这些参数来设计控制器增益和运行闭环仿真。通常情况下,运动参数要么无法从数据表中获得,要么我们观察到的运动行为与数据表所描述的不同。在这种情况下,电机控制模块和它的参数估计能力可以方便地提供一个准确的参数化的电机。
为了估计电机参数,我们将使用电机控制模块集提供的这两个模型。这些模型已经配置为运行参数估计的一个特定组合的微控制器和逆变器,我们在这里使用的德州仪器发射台F28379D和DRV8305逆变器。这些模型可以用作起点,以适应您自己的应用程序。
这个特定的模型包含在电机硬件上运行测试的算法。按照这里的指示,我们首先单击此链接以打开主机模型,然后单击CTRL+D以使用该模型提供的输入更新工作区。然后我们回到目标模型。现在,我们导航到硬件选项卡,并单击该按钮从模型生成代码,并将生成的代码上传到launchpad处理器。一旦代码被编译并上传到硬件,我们就切换到运行在主机上的主机模型,在这里是我的笔记本电脑。
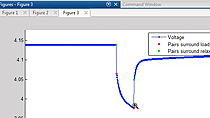
该模型控制参数估计任务的运行。在这里,我们定义电机的标称值,如标称电压,电流,速度,极对的数量,以及电源的输入直流电压。在这里,我们可以指定霍尔传感器的偏移量,我们使用电机控制模块集的其他功能进行计算。一旦我们提供了这些值,我们就可以开始对电机控制硬件进行仪器测试。要运行测试,我们按下运行主机模型的这个按钮。我们看到,首先估计定子电阻,然后估计Ld和Lq,反电动势,电机惯性和摩擦常数。
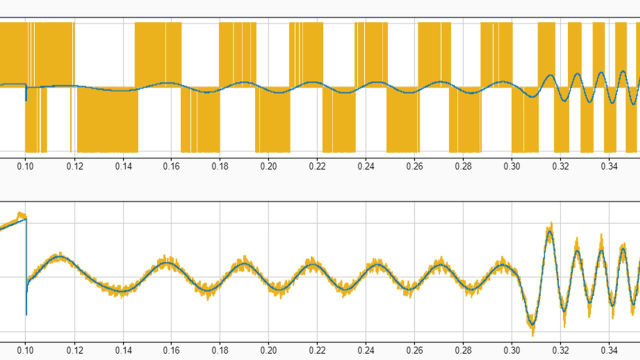
为了了解在测试过程中马达发生了什么,我们可以选择我们想要观察的目标发出的信号。我们可以查看Vd, Vq, Id, Iq等信号。在本例中,我们将使用提供的作用域来查看速度信号。我们可以在这里看到,测试包括卷电机上和卷下来,以计算电机惯性。
既然参数已经估算出来了,我们可以做两件事。一是我们可以将估计的参数保存到MATLAB文件中。然后我们可以使用这个MATLAB文件来计算控制器增益或填充电机模型的参数进行闭环仿真。为此,我们单击“保存”按钮并指定文件的名称。现在,我们转到MATLAB命令行,清除工作区,并加载刚才保存的文件。这创建了一个名为“motorParam”的结构。这个结构有我们刚估计的参数。我们也可以按这个“打开模型”按钮。这将创建一个新的Simulink模型,金宝app其中包含用于建模电机动力学的模块。如果我们打开块对话框,我们看到这个块已经参数化了马达参数的估计值。 We can now use this block for accurate closed-loop simulation of motor dynamics. Note that parameter estimation runs for the motor for no load. If we add load to the motor, we might need to adjust our controller design and model the load dynamics in the simulation. But these initial set of parameters that we obtained here is a useful start for computing motor parameters and setting up closed-loop simulation of our motor control algorithm. This completes the demo.