在这段视频中,我们将看到如何建模全地形电动汽车或简称ATV。我们将看到如何通过结合各种物理系统,如电气,机械,我们可以很容易地建模一个全地形车。
对于视频,我们将参考越野学生比赛中使用的atv,车辆有后轮驱动,并由无刷直流电机驱动。
该视频还将提供信息,说明如何使用该模型作为参考,以优化某些车辆参数,执行简化的紧急制动测试,在颠簸中行驶车辆,最后执行闭环模拟,以跟踪驾驶周期和测量充电状态。
我们希望你会发现视频有用,并将实施的学习,以发展你的车辆模型。
那么,让我们开始吧,欢迎大家来到MATLAB和Simulink赛车休息室。金宝app
假设你有一个电动汽车的仿真模型。你能用它做什么?
嗯,你可以尝试新的想法。例如,是使用简单的齿轮组合还是使用链传动。
您可以在设计阶段发现并修复错误。举个例子,在模拟中,你可以找到你的动力系统无法跟踪驱动周期的原因。
最后,您可以将模型转换为生产代码。
因此,这里是我们使用Simscape开发的开环模型,它使您能够在Simulink环境中快速创建物理系统的模型。金宝app该模型根据输入的占空比输出车速。
它由一个电池源组成,电池源由一系列的电池组成,每个电池是RC等效电路。
电机和逆变器子系统由降压变换器组成,以降低输入电压。无刷直流电动机的相位由提供给三相逆变器的换相逻辑控制。每个子系统都是使用Simscape Electrical基于物理连接的块构建的。
此外,我们有一个简单的传动齿轮和一个简单的纵向车辆动力学子系统组成的车身,轮胎和刹车。
在这个模型中,您可以添加一个仪表板来显示占空比,并更改这些值来检查车辆的速度。
如你所见,模型运行良好。然而,情况并非总是如此。也许您使用适当的连接创建了模型,但您没有得到预期的输出。最常见的原因之一就是车辆参数的选择不当。例如,检查这个无刷直流电机块,需要多个参数,如果你改变磁通量链接,你可以看到,它是限制车辆的最大速度。那么,现在该怎么办呢?一种选择是确保您输入了正确的参数,或者您可以根据您的需求尝试优化参数。
探索第二种选择,让我们定义我们的设计需求。我们希望在t1秒后,车辆速度应该在一定的范围内,基于此,我们可以估计磁通量连杆。为了执行这个估计,我们将从Simulink设计优化工具箱中引入一个“Check Custom bounds”块,并将定义边界。金宝app此外,我们单击应用程序部分下的响应优化器,定义设计变量(在本例中是通量),并运行优化。我们可以看到,一旦优化完成,速度就在范围内,这里是估计值。现在,我们将使用相同的值来执行进一步的模拟。
下一节,我们感兴趣的是测量停止距离。车辆会加速行驶,一旦行驶到一定距离,司机就会刹车。为了应用这个逻辑,我们使用相同的模型。我们将增加盘式制动器来施加前后轴的摩擦扭矩。接下来,我们将测量的距离端口连接到两个开关。一个开关将加速车辆直到它到达60米,另一个开关将确保在同一时间刹车。请注意,我们正在假设一个理想的情况,没有延迟。现在,一旦我们运行模拟,你可以看到速度从有限值下降到零,停止距离大约是8米。请注意,停车距离可以进一步减少根据您的最佳车辆参数和设计。
我们需要增加的另一个重要变量是道路倾斜度。全地形车大多在不同倾斜度的道路上行驶。因此,让我们看看如何包括道路倾斜度。我们总是建议使用记录的地形数据,这样你就可以从这些数据中准备一个1d查找表,以确定行驶距离和道路倾斜度。由于我们没有这些数据,我们只是创建了一个简单的梯形凸起。因此,为了在模型中实现相同的功能,我们编写了几行MATLAB代码,计算倾角并编写了查找表。你可以看到倾斜度在30度时保持不变,然后降到0,然后再降到-30度。表采取的距离,由ATV和输出的倾斜角度。这是附加的子系统实现了模型中变化的倾斜度。当我们运行模拟时,我们可以看到,车辆的速度随着正向倾斜而降低,然后随着它接近负倾斜而增加。
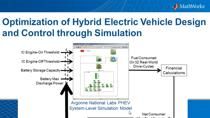
直到现在,所有的模型都是开环模型。现在,让我们看看闭环模型,我们将尝试跟踪驱动周期和测量SOC。在模型中,我们从动力总成模块组中添加了一个驱动周期模块,该模块从mat文件生成用户定义的驱动周期。由于我们没有实际的ATV的测试数据,我们使用了一个随机信号来演示模型。然而,如果您有一个记录的测试数据的驱动周期,这将是伟大的。一些东西,比如越野比赛的获胜者在他们的车辆设计中使用的东西。研究小组使用记录的数据,计算了范围和SOC。现在,你有了更多的动力,让我们回到我们的模型。现在闭环,我们测量速度误差,并增加了PID控制器输出所需的占空比和制动信号。最后,在传统开路电压测量和库仑计数的基础上,增加了一个测量车辆电荷状态的子系统。 Now, as we run the simulation, we see that the vehicle can track the drive cycle, and the simulation stops as the battery reaches 20 % SOC. This was a simplistic approach to calculate the SOC. However, if you are interested to know more about alternative approaches such as Kalman filtering please check out the webpage dedicated towards battery state of charge estimation.
所以,我们刚刚看到了如何使用Simscape模拟一个简单的电动全地形车辆。你一定想知道有什么资源可以学到更多。所以,让我们来看看。如果您是汽车专业学生团队的一员,并希望开始使用Simscape,请阅读物理建模教程,该教程将帮助您的团队开始建模、模拟和分析汽车领域。此外,如果你有兴趣了解更多关于电机控制,请查看电机控制系列,并在Simscape中实现学习,请查看“如何设计电机控制器”视频。如果您来自不同的域,您可以访问Simscape网页以获得额外的资源。
现在,我们的视频结束了,如果你有任何问题,请联系我们racinglounge@mathworks.com,别忘了加入我们的MATLAB和Simulink Racing Lounge小组,了金宝app解最新内容和相关新闻。