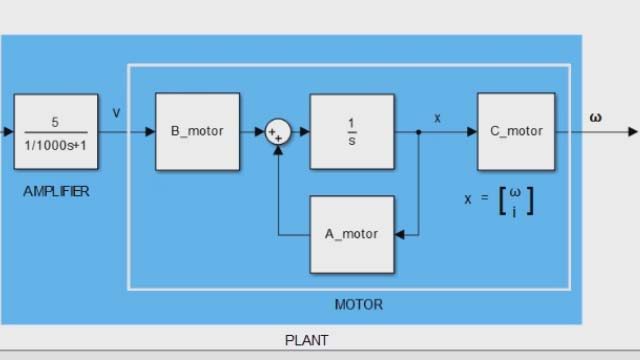
让我们来谈谈线性二次调节器,或等控制。等是一种最优控制基于状态空间表示。在这个视频中,我想介绍这个主题在一个非常高的水平,这样你带走的一般理解控制问题,可以建立在这种理解当你正在研究其背后的数学。我将介绍什么是最优的,如何思考等方面的问题,然后我将向您展示一些例子在MATLAB,我将帮助你获得直觉思考等方面。我是布莱恩,欢迎来到MATLAB技术说话。
首先,让我们来比较一下杆位置控制器的结构,我们在第二个视频和一个控制器等。这样你有某种想法的他们是如何不同。杆位置,我们发现,如果我们每状态的状态反馈增益矩阵矢量相乘,K,我们有能力把我们选择任何闭环极点,假设系统可控和可观察到的。我们确保我们没有参考项稳态跟踪误差。
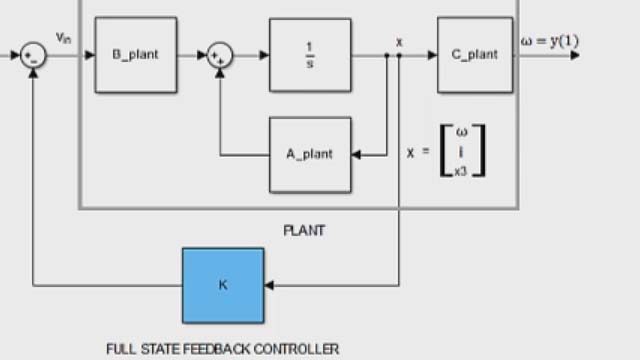
等方面的结构,另一方面,反馈完整的状态向量,然后乘以增益矩阵K,减去按比例缩小的参考。所以,正如你所看到的,这两种控制律的结构是完全diff-well,实际上,不,他们是完全相同的。他们都是全状态反馈控制器和我们可以实现结果与相同的结构等方面和磁极位置。
关于这种结构快速边注:我们可以设置它反馈的积分输出或我们可以申请获得国家的错误。所有这三个实现可以使用可以产生零稳态误差和极点配置的结果或等。如果你想了解更多关于这些其他两个反馈结构,我留下了一个好来源的描述。
好吧,我们回来了。所以我们为什么要给这两个控制器实现不同的名称,如果他们以同样的方式吗?嗯,这是关键。实现是一样的,但是我们如何选择K是不同的。
极点配置,我们解决了K通过选择我们想把闭环极点。我们想的地方他们在一个特定的位置。这是太棒了!但这种方法的一个问题是找到一个好地方对于闭环极点。这可能不是一个非常直观的回答为高阶系统与多个致动器和系统。
等,我们不接杆的位置。我们发现最优K矩阵通过选择闭环对us-specifically很重要的特性,系统执行,和多少努力才能得到的性能。声明可能没有很大的意义让我们走过一个快速的思想运动,我想会有所帮助。
我借了从克里斯托弗亮度和修改这个例子,谁都有自己的视频等,值得一看,如果你想要更深入的解释的数学。我与他视频的描述。但是这里的大意:
假设你想找到最好的或最优的方法从你的家到工作。和你有几个运输选项可供选择。你可以开你的车,你可以骑自行车,坐公共汽车,或者租一架直升机。问题是,这是最优的选择?这个问题本身不能回答,因为我还没告诉你好的结果意味着什么。所有这些选项可以让我们在家工作,但他们这样做是不同的,我们需要找出对我们是很重要的。如果我说时间是最重要的事情,尽快开始工作,那么最优解决方案是直升机。另一方面,如果我说,你没有多少钱,上班尽可能便宜是一个很好的结果,然后骑你的自行车将是最优的解决方案。
当然,在现实生活中你没有无限的钱来最大化性能和你没有无限的时间尽量减少开支,而是你想两者之间找到平衡。所以也许你原因,你有一个早会,因此价值上班的时间,但是你不富有,所以你在乎花多少钱。因此,最佳的解决方案是把车或者坐公共汽车。
现在,如果我们想要一个漂亮的数学方法评估最优的运输方式,我们可以建立一个功能,增加旅行时间和每个选项的数量的钱。然后我们可以设定时间与金钱的重要性与乘数。我们将重量这些矩阵根据自己的个人喜好。我们将调用这个函数,成本或目标函数,你可以看到它是深受这些权重参数。如果问高,然后我们惩罚选项,花费更多的时间,如果R是高的,那么我们惩罚选项,花费很多的钱。一旦我们设置权重,计算每个选项的总成本,选择总成本最低的国家之一。这是最佳的解决方案。
有趣的是,有不同的最佳解决方案基于你附加的性能和支出的相对权重。金宝搏官方网站没有统一的最优解,只是最好的给用户的欲望。一位首席执行官可能需要一架直升机,而大学生可能会骑自行车,但考虑到他们的喜好都是最佳的。
这就是我们所做的同样的推理在设计控制系统。而不是考虑杆位置,我们可以考虑和评估是很重要的我们之间的系统执行和我们想要花多少钱来得到性能。当然,通常我们要花多少钱不是衡量美元但在致动器工作,或者需要的能量。
这就是等方法寻找最优增益矩阵。我们建立一个成本函数,构成了整体性能和工作时间的加权和,然后通过求解等问题,它返回所产生的增益矩阵给出的最低成本的动态系统。
现在我们使用的成本函数等方面看起来有点不同于函数我们为旅游开发的例子,但是这个概念是完全相同的;我们惩罚坏性能通过调整问,我们惩罚执行机构努力通过调整R。
让我们看看这个成本函数性能意味着什么。性能是判断状态向量。现在,让我们假设我们希望每个州都是零,是回到了开始的平衡点。如果初始化系统在一些非零状态,它返回0,越快越好性能和降低成本。和我们可以测量的速度返回所需的状态是通过观察曲线下的面积。这是积分在做什么。曲线面积少意味着它花费更多的时间接近目标比曲线更多区域。
然而,国家可以正面或负面的,我们不希望负值减去总成本,所以我们平方值,以确保它是正的。这惩罚的影响较大的比例比小的错误,但这是一个很好的妥协,因为我们的成本函数转化为一个二次函数。二次函数,如z = x ^ 2 + y ^ 2是凸的,因此,有一个明确的最小值。和二次函数,线性动态保持二次所以我们的系统也会有一个明确的最小值。
最后,我们要有能力重量每个州的相对重要性。因此,问不是一个数字,而是一个方阵,有相同数量的行。需要Q矩阵正定,当我们将它与状态向量,由此产生的价值是积极和非零。而且往往只是一个对角矩阵沿对角线与积极的价值观。这个矩阵,我们可以针对美国,我们想要真正低误差通过Q矩阵中对应的值非常大,和美国一样,我们不关心这些值很小。
的另一半成本函数增加驱动的成本。非常类似的方式,我们看看输入向量和广场的条款,以确保他们是积极的,然后用R重量他们积极的乘数沿对角线矩阵。
我们可以把这个大的矩阵形式如下,虽然你不经常看到这样的成本函数写的,它帮助我们想象的东西。Q和R是这个更大的权重矩阵的一部分,但这个矩阵的对角线项为零。我们可以填写那些角落N,这样整个矩阵仍然正定但现在N矩阵惩罚交叉产品的输入和状态。下载188bet金宝搏虽然有用途设置成本函数N矩阵,对我们我们会让事情变得简单,只是将它设置为零,只关注Q和R。
所以通过设置Q和R的值,我们现在有一个方法来指定什么对我们很重要。如果其中一个执行机构是非常昂贵的,我们要节约能源,那么我们惩罚它通过增加R矩阵值相对应。可能这种情况如果你使用卫星控制的推进器,因为它们消耗燃料,这是一种有限的资源。在这种情况下,您可以接受较慢的反应或多个状态错误,这样你就可以节省燃料。
另一方面,如果性能是至关重要的,那么我们就可以惩罚状态误差通过增加Q矩阵值符合美国我们关心的。这可能是卫星控制的情况下使用反应时轮子因为他们使用能源,可以存储在电池和太阳能电池板的补充。所以使用更多的能量低误差控制可能是一个良好的折衷。
现在的大问题是:我们如何解决这个优化问题?和大失望的答案是,推导这个视频解决方案超出了本文的范围。但我留下了一个好链接的描述如果你想读它。
然而,好消息是,作为一个控制系统设计师,通常的方式方法等方面设计不是通过求解优化问题,但通过开发一个系统动力学的线性模型,然后指定最重要的通过调整Q和R加权矩阵,然后运行等方面的命令在MATLAB解决优化问题并返回最优增益集,然后模拟系统,必要时再次调整Q和R。只要你了解Q和R影响闭环的行为,他们如何惩罚和致动器工作状态错误,你明白,这是一个二次优化问题,然后是相对简单的使用MATLAB等命令来找到最优增益集。
等方面,我们已经设计问题离我们波兰人在哪里,这个问题,我们如何设置Q和r .不幸的是,没有一种放之四海而皆准的方法选择这些权重;然而,我认为设置Q和R比选杆位置更直观。例如,您可以从单位矩阵Q和R,然后通过反复试验调整他们对您的系统和直觉。所以,为了帮助您开发一些直觉,让我们在MATLAB走过几个例子。
好,这需要一点解释。让我们先从代码。我有一个非常简单的模型旋转质量的无摩擦环境和系统有两个州,角和角速率。我设计一个全状态反馈控制器使用等方面,它真的不能简单。我先问第一个的单位矩阵对角条目与角误差和第二个与角速率。只有一个驱动输入系统,这四个旋转推进器都联合起来创建一个转矩命令。因此,R是一个单值。
现在我解出最优反馈增益使用等命令,建立一个代表闭环动力学状态对象。控制器的设计,我可以模拟一个初始条件的响应,我设置到3弧度。这是整个事情。一切在这个脚本只是让这奇特的情节更容易理解的结果。
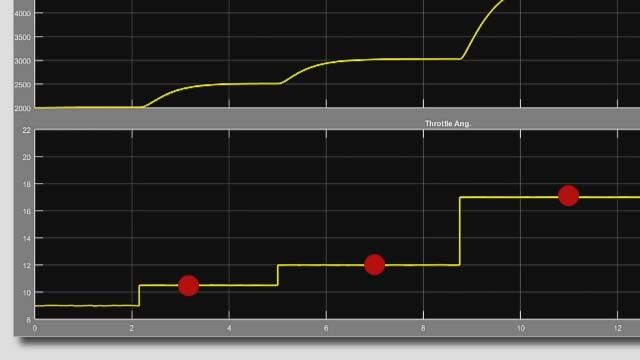
好的,让我们来运行这个脚本。你可以看到不明飞行物被初始化为3弧度。顶部我跟踪机动需要多长时间性能的代表,和多少燃料用于完成操作。让我们踢掉看看控制器。
看,它在5.8秒内完成了机动与15个单位的燃料,牛在这个过程中,这是最重要的部分。当推进器是活跃的时,他们随着时间的推移产生一个力矩,加快了不明飞行物。因此,燃料使用的积分加速度成正比。所以我们加速的时间越长,使用更多的燃料。
现在让我们看看我们是否可以使用更少的燃料为这个惩罚策略的推进器。我将凹凸R 2并重新运行仿真。
我们使用2单位燃料较少,但以牺牲额外/ 3秒。问题是,这种组合,它超过了目标一点点,不得不浪费时间回来。让我们尝试慢下来的最大转速,希望它不会过头。我们要做的,通过惩罚的角速率部分Q矩阵。现在,任何非零成本率的两倍。让我们试一试。
我们节省了第二,因为它没有超调,在这个过程中,设法击败另一个单位的燃料。好了,足够这个小的东西。现在让我们真正节省燃料通过放松角误差重量很多。
好吧,这真的慢了。让我加快视频才熬过来的。最后,我们使用了5单位的燃料,不到一半的使用过。我们可以以另一种方式和优化一个非常积极的控制器。
是的,那是快得多。小于2秒,加速度是罄竹难书。这就是你旋转接一头奶牛。不幸的是,它的代价几乎100单位的燃料,所以双方所有。好吧,希望你开始看到我们如何调整和优化我们的控制器通过调节这两个矩阵。而且很简单。
现在,我知道这个视频是拖,但用不同的脚本我想告诉你一件事真正的快,这就是比杆位置等方面更强大。在这里,我有一个不同,状态空间模型有三个州和一个执行机构。我定义Q和R矩阵和求出了最优增益。和之前一样,我将生成闭环响应,然后运行状态空间模型的初始条件1,0,0。然后我阴谋第一州的反应,这一步从1返回0;执行机构工作;闭环极点的位置和0。
让我们运行这个,看看会发生什么。第一个状态追踪回0,但以牺牲大量的驱动。模型我没有什么特别的事,但假设执行机构推力需要努力。所以这个控制器请求10单位推力。然而,假设我们的推进器只是2单位的推力的能力。该控制器设计将饱和推进器,我们不会得到响应我们正在寻找。现在,我们开发了这个使用极点配置控制器,问题在这一点上,我们应该将这三个波兰人的行动以减少执行机构工作吗?不太直观,对吧?
但随着等方面,我们可以很容易地去R矩阵和处罚执行机构使用通过提高单个值。我将重新运行脚本。我们看到,反应慢,正如所料,但执行机构不再是饱和。看看这个,所有三个闭环极点与这一调整r .如果我们使用杆位置,我们必须知道这些波兰人就像为了减少致动器工作。这将是很艰难的。
这就是我想要离开这个视频。等方面的控制是很强大的,希望你看到,很容易设置和相对直观的优化和调整。最好的部分是,它返回一个最优增益矩阵根据你的体重性能和努力。所以它是取决于你如何你想让你的系统行为。
如果你不想错过下一个科技视频说话,别忘了订阅这个通道。同样,如果你想看看我的通道,控制系统讲座,我覆盖更多的控制理论主题。谢谢收看。下次再见。