 克里夫的角落:克里夫硅藻土在数学和计算
克里夫的角落:克里夫硅藻土在数学和计算 MATLAB的博客
MATLAB的博客 史蒂夫与MATLAB图像处理
史蒂夫与MATLAB图像处理 人在仿真软件金宝app
人在仿真软件金宝app 人工智能
人工智能 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 文件交换的选择
文件交换的选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー 创业、加速器,和企业家
创业、加速器,和企业家 自治系统
自治系统这个算法是太空旅行的关键,GPS, VR和更多,超过50岁
本周早些时候,麻省理工学院技术审查发表了一篇文章“如何一个发明家你可能从未听说过的现代世界”,描述了鲁道夫·卡尔曼对现代科技的贡献一个递归估计算法能够准确预测变量如方向、速度、和位置即使在喧闹的环境。
鲁道夫卡尔曼在1960年第一次描述了卡尔曼滤波器的技术论文,NASA成立后仅仅2年。第一个应用程序的导航卡尔曼滤波器的阿波罗计划。它是用来评估载人航天器的轨道将第一位宇航员送上月球并返回。自那时以来,它已经被应用在很多技术,影响我们的日常生活,或将在不久的将来。
下面列出的一些现代技术,使用卡尔曼滤波器:
全球定位系统(GPS)
整个基于卫星的全球定位系统(GPS)被称为“一个巨大的卡尔曼滤波器”工程的教科书全球定位系统、惯性导航和集成。据一位IEEE的文章在卡尔曼滤波的应用在航空航天,“这个卡尔曼滤波器有一个很大的系统状态向量,包括24 +卫星的轨迹,所有系统时钟的漂移率和阶段,有关大气传播延迟和数以百计的参数作为时间的函数和位置。”

图片来源:维基百科
风力涡轮机
绿色技术是许多研究的重点和商业投资。在欧洲,风能收养和卡尔曼滤波器的快速发展帮助提高这项技术的效率。
Phys.org最近分享了一篇文章名为“风力发电的软件“侦探””,他们描述了一种新的方法来延长风力涡轮机的生活通过探测风风切变和极端阵风等异常现象。智能控制软件Windtrust项目利用扩展卡尔曼滤波器进行回归分析。

图片来源:维拉Kratochvil, PublicDomainPictures.net
天气预报
今年4月,华盛顿邮报》美国国家气象局报道正在两个改进他们的全球预测系统(GFS)预测模型。第一个建立了一个时间戳数据点用于运行模型,消除了假设同时收集的数据点。第二个升级利用卡尔曼滤波算法的一个变种。“第二个除了是一个卡尔曼滤波器,或EnKF,这本质上扔掉坏的数据将导致一个可怜的预测。”

图片来源:GFS仿真的动画形象,美国国家海洋和大气管理局。
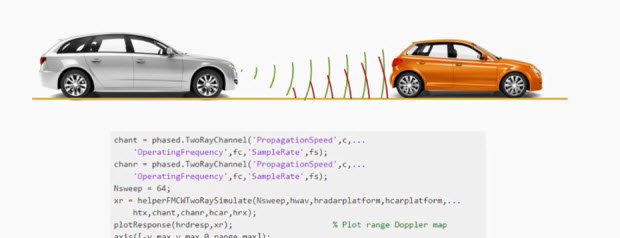
高级驾驶员辅助系统(ADAS)
虽然无人驾驶汽车上许多新闻,ADAS的简化视图是我们的道路导航系统类似于系统阿波罗用于空间。ADAS系统最终将负责提供自主车辆导航指导。根据保罗Whytock的文章为什么汽车司机爱卡尔曼滤波”,司机都应该热爱它的原因很简单,它增加了先进的驾驶员辅助系统(ADAS)效率,使车辆控制操作,比如盲点检测、稳定和牵引力控制系统,车道偏离检测和自动制动在紧急情况下更安全、更有效。”
虚拟现实(VR)
在虚拟现实中,预测跟踪用于预测对象的位置和它的轨迹。卡尔曼滤波器是一种常见的选择对于这个应用程序。一个麻省理工学院出版社期刊跟踪条使用卡尔曼滤波器在VR应用程序状态的历史,“近年来已经有爆炸的使用VR / AR的卡尔曼滤波器。事实上,有关这些天VR技术会议,这将是不寻常的看到一篇关于跟踪没有使用某种形式的卡尔曼滤波器,或画那些做比较。”

虚拟现实例子从Mathworks.com
MATLAB和卡尔曼滤波器
卡尔曼滤波器有许多应用程序中,有多个可用MATLAB资源展示如何在你的设计中使用它们。
- 计算机视觉系统经常依赖对象跟踪卡尔曼滤波器,特别是当需要跟踪多个对象。这是一个短视频在这个话题。
- 这里有一个示例显示如何执行自动检测从一个移动相机和跟踪。这个例子包含几个额外的算法步骤包括检测、定制non-maximum抑制,和启发式识别和消除假警报的踪迹。
- 卡尔曼滤波器常用在GNC系统中,如在传感器融合,他们合成的位置和速度信号融合GPS和IMU(惯性测量单元)测量。一个案例研究使用卡尔曼滤波器控制系统可以看到在这里。
- 这里有一个例子使用卡尔曼滤波器来估计车辆的位置和速度,可以自由移动的二维空间没有任何约束。
有很多例子使用卡尔曼滤波器。请发布评论,让我们知道你利用卡尔曼滤波器的设计。


另请参阅
-
”背后的标题”的帖子
博客




댓글
댓글을남기려면링크를클릭하여MathWorks계정에로그인하거나계정을새로만드십시오。