内容
阿维(Avi)的一周选择是硬件支持包金宝app
对于Windows运行时Kinect的图像采集工具箱金宝app支持包, 经过
The Image Acquisition Toolbox Team。使您能够acqu硬件支持包金宝appire RGB, depth images, and 3-D point clouds from a Kinect v2 sensor. If you have a Kinect for Windows v2 you can start using it in MATLAB by downloading the hardware support package from File Exchange.
在MATLAB中使用Kinect进行Windows V2
Sucsesfuly安装了硬件支持软件包后,您可以通过定义iMaq.videDodeVice S金宝appystem对象连接到设备。请记住Kinect V2返回RGB和深度图像,因此我们为每个图像创建一个系统对象
colordevice = imaq.videodevice('kinect',,,,1) depthDevice = imaq.VideoDevice('kinect',,,,2)
colorDevice = imaq.VideoDevice with properties: Device: 'Kinect V2 Color Sensor (kinect-1)' VideoFormat: 'BGR_1920x1080' ROI: [1 1 1920 1080] ReturnedColorSpace: 'rgb' ReturnedDataType: 'uint8' DeviceProperties: [1x1 imaq.internal.DeviceProperties] depthDevice = imaq.VideoDevice with properties: Device: 'Kinect V2 Depth Sensor (kinect-2)' VideoFormat: 'Depth_512x424' ROI: [1 1 512 424] ReturnedColorSpace: 'grayscale' ReturnedDataType: 'uint16' DeviceProperties: [1x1 imaq.internal.DeviceProperties]
初始化设备
Now lets initialize the device and grab an input RGB image and a depth image.
步骤(Colordevice);step(depthDevice);colyImage = step(colordevice);depthimage = step(depthdevice);
从设备获取3-D点云
由于传感器具有颜色和深度信息,因此您可以将两个传感器的信息组合在一起,以创建一个3-D点云。
ptcloud = pcfromkinect(Depthdevice,Depthimage,Lolilimage);
从Kinect V2查看点云流
让我们初始化PCPLAYER,使我们可以可视化3-D点云的实时流。我们首先初始化玩家。
player = pcplayer(ptcloud.xlimits,ptcloud.ylimits,ptcloud.zlimits,...'VerticalAxis',,,,'y',,,,'垂直线索',,,,'down');xlabel(player.Axes,'X (m)');ylabel(player.axes,'Y (m)');zlabel(player.Axes,'z(m)');为了i = 1:500 colorimage = step(colordevice);depthimage = step(depthdevice);ptcloud = pcfromkinect(Depthdevice,Depthimage,Lolilimage);查看(播放器,ptcloud);结尾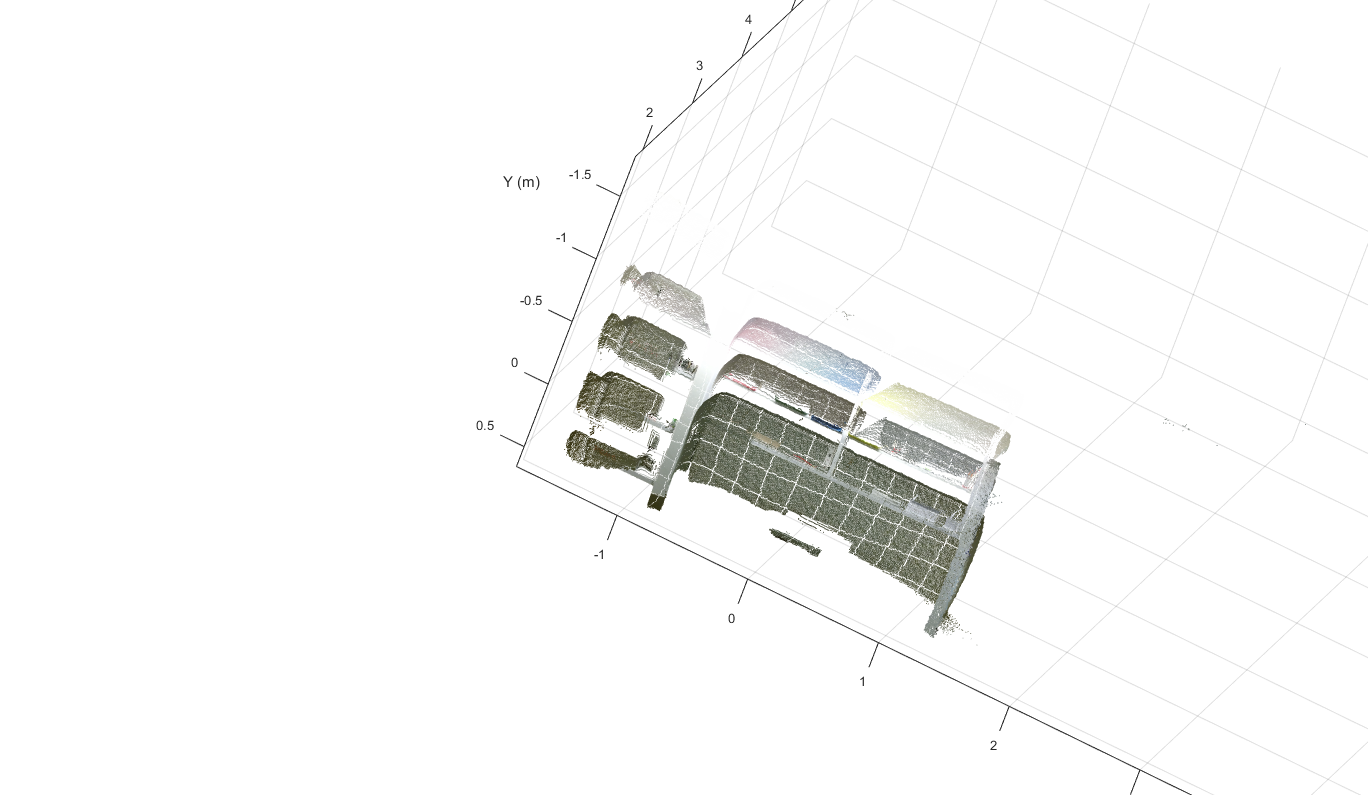
检测3-D点云中的平面
Once we have aquired a 3-D point cloud from the Kinect v2 we can process it using functionality in the Computer Vision System Toolbox. Here I simply extract and display planes in the 3-D point cloud.
colyImage = step(colordevice);depthimage = step(depthdevice);ptcloud = pcfromkinect(Depthdevice,Depthimage,Lolilimage);maxDistance = 0.02; referenceVector = [0,0,1]; maxAngularDistance = 5; [model,inlierIndices,outlierIndices] = pcfitplane(ptCloud,maxDistance,referenceVector,maxAngularDistance); figure; pcshow(ptCloud); holdon;图(模型)
释放设备
当你们都是时,不要忘记释放设备。
release(colorDevice); release(depthDevice);
 克利夫的角落:克莱夫·莫勒(Cleve Moler)在数学和计算上
克利夫的角落:克莱夫·莫勒(Cleve Moler)在数学和计算上 MATLAB博客
MATLAB博客 史蒂夫(Steve)与MATLAB进行图像处理
史蒂夫(Steve)与MATLAB进行图像处理 Guy on Simulink
Guy on Simulink Deep Learning
Deep Learning Developer Zone
Developer Zone Stuart的MATLAB视频
Stuart的MATLAB视频 头条新闻
头条新闻 档案交换一周
档案交换一周 Hans on IoT
Hans on IoT Student Lounge
Student Lounge MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー Startups, Accelerators, & Entrepreneurs
Startups, Accelerators, & Entrepreneurs






Comments
要发表评论,请单击here登录您的数学帐户或创建一个新帐户。