 克里夫的角落:克里夫硅藻土在数学和计算
克里夫的角落:克里夫硅藻土在数学和计算 MATLAB的博客
MATLAB的博客 史蒂夫与MATLAB图像处理
史蒂夫与MATLAB图像处理 人在仿真软件金宝app
人在仿真软件金宝app 人工智能
人工智能 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 文件交换的选择
文件交换的选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー 创业、加速器,和企业家
创业、加速器,和企业家 自治系统
自治系统
定制车辆建模使用Simscape语言
今天,我很高兴介绍安德里亚Casadio,他是一个初级机械工程师和第一次客人在这个博客。安德里亚是描述他的论文工作Politecnico di都灵他开发了Simscape™库车辆建模。
谢谢你安德里亚提供社区对你的工作MATLAB中央FileExchange。
- - - - - - - - - - - -
当我在大学学习汽车动力学,我花了很多时间在仿真软件建模金宝app®。我所做的实际上是创建模型基本方程的基础上试图模仿实际系统。这种方法越来越费时,当我使用更先进的系统建模方法。最终,我花了更多的时间建设车辆模型,而不是发展和优化模拟。
在这一点上,我发现了Simscape。Simscape让我加速创建模型中的物理系统仿真软件环境。金宝appSimscape块通常提供一个系统的功能仿真软件模块在一个块。金宝app
无论如何,描述Simscape的利弊并不是这篇文章的范围。让我们的工作说明!
一开始我的项目,我发现默认的Simscape动力传动系统库只允许纵向行为的模拟。原因是轮胎块提供了基于数学模型,考虑纵向力轮胎和道路之间交换。正如所料,MathWorks提供功能,允许创建自定义组件使用Simscape语言。
上面的原因,第一个目标是开发定制的轮胎块基于更涉及数学模型如Pacejka的89年和96年,也考虑横向和纵向部队之间的组合。

图1 -一个定制的轮胎块的例子
横向和纵向力功能的横向和纵向轮胎滑移,这取决于轮子的平移和旋转速度。开发这种类型的块有必要使用Simscape语言来定义:
- 保护港口转移速度和力信息;
- 域宣言、变量、参数和方程。
保护端口的接口与其他Simscape组件,在上面所示的例子有“HX”和“衔接”的保护港口机械平移域上定义的。也有“一个”,这是保护港口机械旋转域上定义的。
验证轮胎模型,有必要运用纵向和横向运动的轮胎模型,可以得到图2和图3所示的情节。
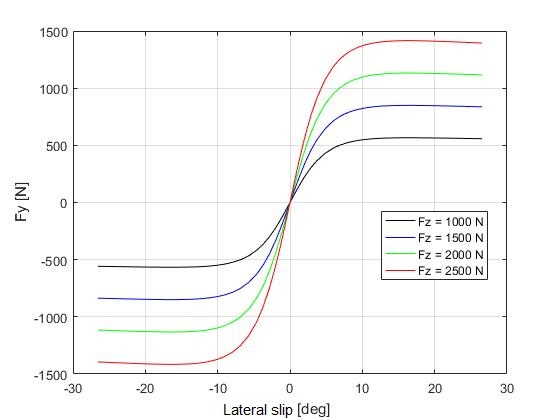
图2 -侧向力横向滑动的函数在不同竖向荷载——Pacejka 89模型
图2显示了轮胎纵向滑移时的典型行为是零(无刹车或加速)。的趋势是Pacejka模型的结果。如果你看看图1块,没有选择引入垂直荷载变量,这是作为一个整体介绍的参数。

图3 -侧向力纵向力的函数在一个不同的侧向滑移角——Pacejka 89模型
应用不同的输入块的图1可以得到图3图,显示多路之间的侧向力和轮胎的纵向力变化的函数不同的侧向滑移条件(α)。当纵向力为零,最大侧向力。这很简单,因为轮胎的抓地力角落更高当司机不适用刹车或油门。相反的情况是当纵向力最大。在这种情况下,侧向力为零。即使按照常识,你可能认为它并不是一个好主意在角落应用太多的刹车或油门。
作为轮胎做的,从一个3自由度(自由度)模型的车辆,可以开发一个块描述车辆身体动力学:

图4 - 3自由度车辆模型
这是一个3自由度车辆模型的简短描述(图4):
- HXFR、HXFL HXRR, HXRL保护港口机械平移域上定义的。与这四个连接可以连接车辆身体其他块(如轮胎),但只有在纵向方向。为每个轮胎有一个端口(FR方法前,RL意味着后离开,等等)。
- HYFR、HYFL HYRR, HYRL保护港口机械平移域上定义的。这些连接可以连接汽车身体中的其他模块(如轮胎)横向
- 非功能性需求,NFL, NRR,海军研究实验室的物理信号输出代表垂直载荷。这些港口是有用的,让可连接块与图1所示。事实上,三自由度模型不考虑荷载传递在纵向或加速度。在这种情况下,它被认为是一个恒定值,根据车辆的载荷分布在静态条件下没有任何类型的斜坡。圣是代表转向角的物理输入
- PX, PT和偏航三个输出代表位置沿x, y和偏航。偏航角的车辆的垂直轴的旋转通过重心(齿轮)。

(点击图片放大)
始,一个完整的项目与3 - 4 wd模型微分三自由度
微型计算机体积很小的系统允许车辆行为模型:
- 输入:方向盘角(ST);
- 输出:质心的坐标和偏航角(PX, PY偏航)。
来验证这些块,四轮驱动汽车的四个不同的配置定义了三个差异后,见图7:
- 所有的差异了
- 中央差速器锁
- 中部和后部微分锁
- 所有差异锁

图7 - 4种不同配置用于模拟三自由度模型
节省MATLAB工作区了重心坐标,在模拟过程中,可以绘制车辆质心的轨迹(见图7)。这个图显示,正如所料,越来越under-steering行为差异已被锁定。

图7 -车辆轨迹在不同的工作条件
建模工具提供了与前面定义的自定义块,与仿真软件模型相比,系统的清洁表示。金宝app然而,它不是简单的定义车辆动态块基于物理系统的方程。不用担心,正如Christoph指出的,我与你分享的材料MATLAB中央FileExchange。
另一个替代方法是使用“多体仿真工具,称为MathWorks Simscape多体™。模型看起来像一个显示在Fig.8 Fig.9的图形表示。

(点击图片放大)
图8 - 6自由度车辆模型建立与Simscape多体

Fig.9 - 6自由度车辆模型的表示
最后,不可否认,很难给紧凑的建议是否使用Simscape或Simscape多体。在非常短暂,Simscape多体将提供一个图形表示的模型自动构建的模型。它也会让你接触,发现这里的详细模型介绍接触建模。在Simscape相比,这些附加功能将需要更多的CPU时间求解系统方程。
让我向你介绍之前篇文章比赛休息室关注车辆建模。特别是,使用Simscape多体建模方法将彻底讨论Simscape多体的优点和缺点。甚至更好,所有的模型都提供MATLAB中央FileExchange。
如果我的工作有一个关键的结论,那就是:有很多机会来模拟车辆模型和不同悬挂参数的影响进行调查。无论你是在仿真软件工作,Simscape或Simscape多体,通过MAT金宝appLAB工作区参数可以被修改。
这项工作是一个有趣的机会的巨大潜力MATLAB时车辆建模。可以肯定的是,未来可能实现的有很多,例如进一步发展的轮胎模型考虑荷载传递或车轮角悬挂旅游期间的变化特征。我很乐意听到你的反馈对我的工作。
谢谢MathWorks赛车休息室的机会发表博客!
- 类别:
- 汽车、
- Simscape,
- 金宝app仿真软件,
- 技能,
- 工作流








评论
留下你的评论,请点击在这里MathWorks账户登录或创建一个新的。