 克利夫角:克利夫莫勒的数学和计算gydF4y2Ba
克利夫角:克利夫莫勒的数学和计算gydF4y2Ba 罗兰谈MATLAB的艺术gydF4y2Ba
罗兰谈MATLAB的艺术gydF4y2Ba 用MATLAB进行图像处理gydF4y2Ba
用MATLAB进行图像处理gydF4y2Ba Simulin金宝appk上的GuygydF4y2Ba
Simulin金宝appk上的GuygydF4y2Ba 深度学习gydF4y2Ba
深度学习gydF4y2Ba 开发区域gydF4y2Ba
开发区域gydF4y2Ba Stuart的MATLAB视频gydF4y2Ba
Stuart的MATLAB视频gydF4y2Ba 头条新闻背后gydF4y2Ba
头条新闻背后gydF4y2Ba 本周文件交换选择gydF4y2Ba
本周文件交换选择gydF4y2Ba 汉斯谈物联网gydF4y2Ba
汉斯谈物联网gydF4y2Ba 学生休息室gydF4y2Ba
学生休息室gydF4y2Ba 创业公司、加速器和企业家gydF4y2Ba
创业公司、加速器和企业家gydF4y2Ba MATLAB社区gydF4y2Ba
MATLAB社区gydF4y2Ba MatlabユザコミュニティgydF4y2Ba
MatlabユザコミュニティgydF4y2Ba
使用Simulink、RoadRunner和NVIDIA DRIVE Sim构建自动驾驶汽车(AV)仿真工具链金宝appgydF4y2Ba
今天的博客由MathWorks Product Marketing团队撰写:gydF4y2Ba阿维尼希米gydF4y2Ba,gydF4y2Ba彼得FryscakgydF4y2Ba而且gydF4y2Ba迈克SasenagydF4y2Ba.gydF4y2Ba
本博客将概述MathWorks的三个平台——MATLAB、Simulink和金宝appgydF4y2Ba走鹃gydF4y2Ba-集成并支持自动驾驶汽车(AV)开发人员使金宝app用的工作流程gydF4y2BaNVIDIA DRIVE Sim卡gydF4y2Ba,一个可扩展的、物理精确的、多样化的仿真平台。gydF4y2Ba

这gydF4y2Ba由两部分组成gydF4y2Ba博客系列介绍了MathWorks平台支持使用NVIDIA DRIVE Sim的AV开发人员的两种方式金宝appgydF4y2Ba或者将算法部署到gydF4y2BaNVIDIA硬件。gydF4y2Ba
- 第一部分-gydF4y2Ba集成与驱动器Sim为egydF4y2Ba既减少gydF4y2Ba米gydF4y2Ba基础上gydF4y2Ba以及车辆动力学gydF4y2Ba:gydF4y2BaHgydF4y2Baow MathWorks工具与DRIVE Sim集成到gydF4y2Ba:gydF4y2Ba
- DgydF4y2Ba的结果gydF4y2Ba3D网络和场景gydF4y2Ba用于模拟使用gydF4y2Ba走鹃gydF4y2Ba和gydF4y2Ba Sim 连接器 gydF4y2Ba走鹃gydF4y2Ba gydF4y2Ba导出模拟就绪环境gydF4y2Ba来gydF4y2Ba Omniverse 。gydF4y2Ba
- 夫妇gydF4y2Ba高保真车辆动力学模型gydF4y2Ba从gydF4y2Ba车辆动力学gydF4y2BaBlocksetgydF4y2Ba荷兰国际集团(ing)ydF4y2Ba金宝appDRIVE Sim的自我车辆。gydF4y2Ba
- 第二部份-gydF4y2Ba将算法部署到gydF4y2Ba驱动平台:gydF4y2BaHgydF4y2Ba噢,gydF4y2BaggydF4y2BaegydF4y2Ba从MATLAB代码和Simulink模型中生成优化的CUDA代码金宝appgydF4y2Ba使用gydF4y2BaGPU编码器gydF4y2Ba而且gydF4y2Ba嵌入式编码器gydF4y2Ba用于部署到NVIDIAgydF4y2Ba开车gydF4y2Ba硬件。gydF4y2Ba
环境建模gydF4y2Ba
AV开发人员需要开发逼真的3D环境来模拟和测试gydF4y2Ba他们的感知,规划和控制算法。gydF4y2Ba他们面临的主要挑战之一是现实世界的道路非常复杂,创建模拟3D场景非常耗时。gydF4y2Ba走鹃gydF4y2Ba是一个交互式编辑器,为模拟和测试自动驾驶系统设计3D场景。开发人员可以通过创建特定区域的道路标志和标记来定制道路场景,以及插入标志、信号、护栏、道路损坏、树叶、建筑物和其他3D模型。gydF4y2Ba
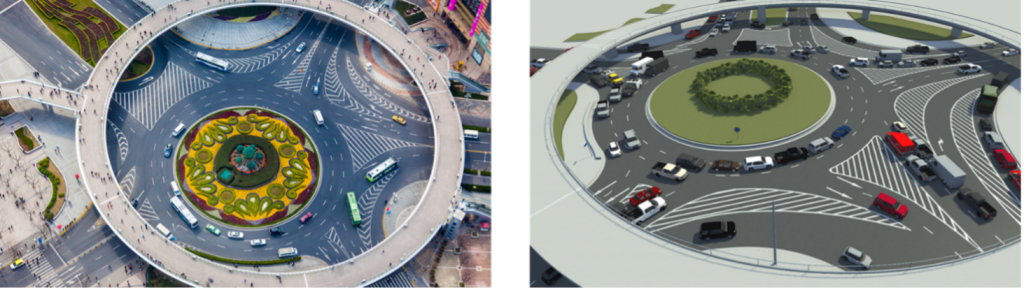
复杂的现实道路网络(左)gydF4y2Ba和仿真就绪的环境gydF4y2Ba走鹃gydF4y2Ba(右)gydF4y2Ba
AV开发人员可以在30分钟内使用DRIVE Sim连接器创建下面的3D环境gydF4y2Ba走鹃gydF4y2Ba导出到gydF4y2Ba英伟达gydF4y2BaOmniversegydF4y2Ba用于模拟或与其他3D生产管道集成。gydF4y2Ba

3D环境中创建gydF4y2Ba走鹃gydF4y2Ba并使用DRIVE Sim连接器导出到OmniversegydF4y2Ba走鹃gydF4y2Ba.gydF4y2Ba
以上环境可分为以下几个部分:gydF4y2Ba
- 添加gydF4y2Ba道路,车道和sgydF4y2BaidewalkgydF4y2Ba年代gydF4y2Ba
- 创建连接gydF4y2Ba
- 添加连接标记和道具gydF4y2Ba
- 把树叶gydF4y2Ba
让我们从创建道路网络以及相关的车道标记和人行道开始。要做到这一点,gydF4y2Ba道路规划工具gydF4y2Ba荷兰国际集团(ing)ydF4y2Ba走鹃gydF4y2Ba用于创建和布局道路。然后gydF4y2Ba车道的工具gydF4y2Ba使用gydF4y2Ba配置不同的车道和设置道路的属性,包括行驶方向和车道类型。在这个gydF4y2Ba的例子中,gydF4y2Ba改变了车道的宽度,并从一侧移除了人行道,以匹配航拍图像。这很常见gydF4y2Ba走鹃gydF4y2Ba用户利用空中或激光雷达图像的场景,以模板覆盖他们的道路网络。gydF4y2Ba
现在道路网络已经建立,然后就可以创建t型交叉口了。gydF4y2Ba走鹃gydF4y2Ba当道路交叉时自动创建路口;在本例中,t型结是使用gydF4y2Ba自定义连接工具gydF4y2Ba.gydF4y2Ba走鹃gydF4y2Ba包括各种gydF4y2Ba连接工具gydF4y2Ba自定义模拟中的外观和行为。gydF4y2Ba

现在,gydF4y2Ba有停车标志的路口gydF4y2Ba更新gydF4y2Ba使用gydF4y2Ba道具点工具gydF4y2Ba在美国,“停止”一词被涂在道路上gydF4y2Ba标记点工具gydF4y2Ba,gydF4y2Ba还有一条停止线gydF4y2Ba是gydF4y2Ba创建的gydF4y2Ba标记曲线工具gydF4y2Ba.gydF4y2Ba

随着道路网络和路口的建立gydF4y2Ba,gydF4y2Ba一些树叶gydF4y2Ba可插入gydF4y2Ba更接近地模拟环境。的gydF4y2Ba走鹃gydF4y2Ba资产库gydF4y2Ba提供一组预先构建的道具gydF4y2Ba而gydF4y2Ba导入资产gydF4y2Ba可以gydF4y2Ba创建外部gydF4y2Ba成gydF4y2Ba走鹃gydF4y2Ba.对于这个场景,一个对象的集合gydF4y2Ba是gydF4y2Ba使用gydF4y2Ba被称为gydF4y2Ba道具组gydF4y2Ba.gydF4y2BaPgydF4y2Ba罗普集gydF4y2Ba可以拖动gydF4y2Ba对象的现有支柱多边形上gydF4y2Ba道具多边形工具gydF4y2Ba可以使用gydF4y2Ba填充一个新的区域。gydF4y2Ba

现在3D环境准备好了,场景就可以导出了gydF4y2Ba走鹃gydF4y2Ba来gydF4y2BaOmniversegydF4y2Ba使用gydF4y2Ba开车gydF4y2BaSim卡连接器gydF4y2Ba走鹃gydF4y2Ba.到目前为止,这个例子是基于一个简单的场景。下面是RoadRunner在对一个更复杂的场景建模时的一些结果图:gydF4y2Ba



以下是使用DRIVE Sim连接器到RoadRunner后从DRIVE Sim获得的相同图像。DRIVE Sim使用Omniverse RTX渲染来进行基于物理的灯光、材料和基于实时光线追踪的传感器模拟。gydF4y2Ba



车辆动力学gydF4y2Ba
为了gydF4y2Ba进行车辆水平研究,gydF4y2Ba开发人员需要决定gydF4y2Ba车辆模型本身所需的保真度。在某些情况下,车辆模型可能是微不足道的。例如,交通模拟通常将每辆车视为沿着特定轨迹在空间中移动的简单质量。然而,在紧急制动测试等情况下,gydF4y2Ba一个gydF4y2Ba车辆的高保真模型gydF4y2Ba是必要的gydF4y2Ba.车辆动力学gydF4y2BaBlocksetgydF4y2Ba是一个Si金宝appmulink附加产品,旨在帮助解决这类问题。gydF4y2Ba下面是gydF4y2Ba下面是几个例子。gydF4y2Ba
车辆动力学gydF4y2BaBlocksetgydF4y2Ba附带了几个预构建的参考应用程序,使其更容易入门。例如,gydF4y2Ba恒半径机动gydF4y2Ba包括一个车辆模型,完整的驾驶员,控制器,传感器,动力系统,车轮,刹车,转向,gydF4y2Ba悬架gydF4y2Ba和底盘。gydF4y2Ba
 这些类型的车辆模型可以非常详细,并且可以参数化来反映gydF4y2Ba的gydF4y2Ba系统利息更准确。例如,gydF4y2Ba映射SI引擎gydF4y2Ba模型gydF4y2Ba可以使用gydF4y2Ba下面进行校准gydF4y2Ba的gydF4y2Ba引擎通过导入测试数据。gydF4y2Ba
这些类型的车辆模型可以非常详细,并且可以参数化来反映gydF4y2Ba的gydF4y2Ba系统利息更准确。例如,gydF4y2Ba映射SI引擎gydF4y2Ba模型gydF4y2Ba可以使用gydF4y2Ba下面进行校准gydF4y2Ba的gydF4y2Ba引擎通过导入测试数据。gydF4y2Ba

同样地,gydF4y2Ba开发人员可以使用gydF4y2Ba的gydF4y2Ba运动学与顺应性gydF4y2Ba参考申请gydF4y2Ba进口gydF4y2Ba悬架试验或多体动力学模拟的数据,拟合响应面模型,并参数化gydF4y2Ba映射悬架模型gydF4y2Ba这很像真实系统的行为。gydF4y2Ba

在参数化了车辆模型之后,让我们进行一些实验来表征它的行为。常量半径引用应用程序包括一个gydF4y2Ba参考发生器gydF4y2Ba这允许开发者从预定义的标准化测试列表中进行选择,如双车道变化或缓慢增加转向机动。这个过程首先是一个恒定半径测试,以评估车辆在指定速度下保持固定转弯半径的能力。通过扫描越来越高的车辆速度,可以检查车辆速度、横向加速度和车辆滑移等信号,以确定车辆是否满足系统要求。gydF4y2Ba

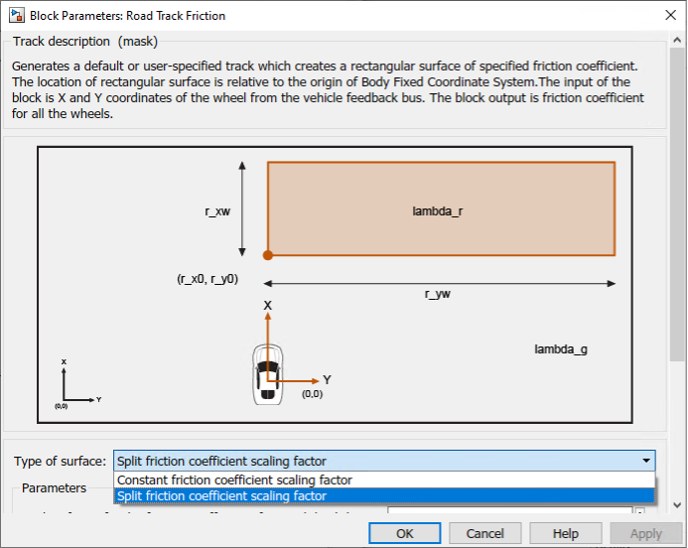
在测试了一套操作操作后,gydF4y2Ba制动试验机动gydF4y2Ba可以运行gydF4y2Ba以评估车辆的停止gydF4y2Ba平gydF4y2Ba到指定初始速度的距离。这个参考应用程序包括ABS控制器和一个对话框,用于指定运行split-mu测试的表面条件。gydF4y2Ba
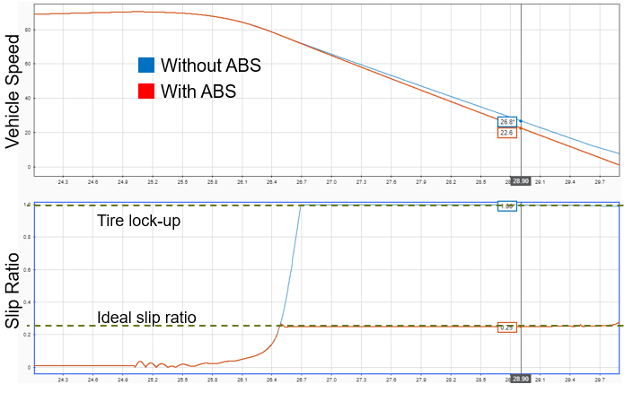
与此制动试验,结果gydF4y2Ba可以比较gydF4y2Ba通过不同的制动控制器和不同的工况来评估车辆的性能。例如,以下结果表明,ABS控制器在紧急制动事件中成功防止了后轮抱死,从而提高了停车距离。gydF4y2Ba
因为车辆动力学gydF4y2BaBlocksetgydF4y2Ba都是建立在Simulin金宝appk上的gydF4y2Ba可以运行gydF4y2Ba关于NVDIAgydF4y2Ba驱动SimgydF4y2Ba平台。这增加了一个全新的程度gydF4y2Ba性能gydF4y2Ba而且gydF4y2Ba的灵活性,允许gydF4y2Ba开发人员gydF4y2Ba更有效地进行研究gydF4y2Ba而gydF4y2BaleveraggydF4y2Ba荷兰国际集团(ing)gydF4y2Ba的gydF4y2Ba其他可用的功能gydF4y2Ba的gydF4y2Ba驱动SimgydF4y2Ba生态系统。gydF4y2Ba
看看第二部分gydF4y2Ba中创建的算法的本系列的gydF4y2BaMATLAB和Simu金宝applink到NVIDIA DRIVE平台gydF4y2Ba.gydF4y2Ba
要了解如何使用不同的MathWorks平台进行自动驾驶开发,以及其他自动驾驶开发人员如何在开发中使用MathWorks平台,请注册gydF4y2BaMATLAB世博会gydF4y2Ba4日gydF4y2BathgydF4y2Ba和5gydF4y2BathgydF4y2Ba2021年5月。活动包括其他MathWorks用户在自动驾驶方面的演讲,包括:gydF4y2Ba
- 博世gydF4y2Ba
- 康明斯gydF4y2Ba
- 通用汽车(General Motors)gydF4y2Ba
- 通汽车gydF4y2Ba
- 保时捷工程gydF4y2Ba
- 雷诺日产gydF4y2Ba
- TuSimplegydF4y2Ba
- ZFgydF4y2Ba
MathWorks工程师关于自动驾驶的技术介绍包括:gydF4y2Ba
- MATLAB新特性,gydF4y2Ba金宝app而且gydF4y2Ba走鹃gydF4y2Ba自动驾驶gydF4y2Ba
- 自动驾驶传感器融合算法的设计与评估gydF4y2Ba
- 为自动驾驶测试开发虚拟场景gydF4y2Ba
- 高速公路变道机动运动规划的开发gydF4y2Ba
- 类别:gydF4y2Ba
- 自动驾驶,gydF4y2Ba
- 金宝app仿真软件,gydF4y2Ba
- 工作流gydF4y2Ba


另请参阅gydF4y2Ba
-

扬克和埃姆德,重访gydF4y2Ba
博客gydF4y2Ba
-

新HPL-AI基准的矩阵gydF4y2Ba
博客gydF4y2Ba
-





评论gydF4y2Ba
如欲留言,请点击gydF4y2Ba在这里gydF4y2Ba登录您的MathWorks帐户或创建一个新帐户。gydF4y2Ba