 克利夫角:克利夫莫勒的数学和计算
克利夫角:克利夫莫勒的数学和计算 罗兰谈MATLAB的艺术
罗兰谈MATLAB的艺术 用MATLAB进行图像处理
用MATLAB进行图像处理 Simulin金宝appk上的Guy
Simulin金宝appk上的Guy 深度学习
深度学习 开发区域
开发区域 Stuart的MATLAB视频
Stuart的MATLAB视频 头条新闻背后
头条新闻背后 本周文件交换选择
本周文件交换选择 汉斯谈物联网
汉斯谈物联网 学生休息室
学生休息室 创业公司、加速器和企业家
创业公司、加速器和企业家 MATLAB社区
MATLAB社区 Matlabユザコミュニティ
Matlabユザコミュニティ
基于MATLAB的无级变速器动态特性预测
今天的客座博客是亚历克斯·席尔瓦(Alex Silva da purifica)和卢卡斯·马丁斯·里卡尔迪从联合国我大学的Brasília- - - - - -下哈塞拉多海盗队。他们会。说明他们如何利用MATLAB来预测一个容器的动态行为u无级变速器(CVT)
介绍和动力
无级变速器(CVT)是一种能够连续改变传动比的汽车自动变速器概念,可以保持发动机的转速恒定,从而保持其扭矩和动力传递。无级变速器的使用是相当常见的在巴哈SAE团队,因为它具有替代使用的能力的传统离合器的可能性被调整用于不同的应用。
在此背景下,我们从pirata做塞拉多巴哈SAE团队Brasília大学在过去的几个赛季里,我们一直致力于调整flyweights和springs的设置,以定义最好的设置为我们的汽车提供更好的纵向性能。然而,多年来,这种设置被执行了主要是基于实验,这需要大量的测试时间和财政资源。

因此,在最后一年,我们决定实施一项雄心勃勃的计划毕业论文从控制机构和皮带的建模出发,在MATLAB中开发了一种预测无级变速器动态行为的算法。Consequently,改变的输入是可能的飞重的质量和惯性,弹簧刚度并分析了副滑轮的转速和转矩输出。从而无级变速器的设计和安装过程成为更便宜的和少详尽的。
最初的目标是来设计我们自己的CVT与这模型但是在看到了算法的复杂性和各种可能性之后,我们意识到要想成功,我们需要对模型变量有充分的了解。然后,我们缩减规模,集中精力只是在运动动态分析。
我们将在以下主题中进行尝试来简要介绍我们在项目开发的当前阶段获得的方法和结果,以及未来的实施和项目。
方法
我N阶to模型全局无级变速器行为,我们把工作分成两部分来两个不同的模型,一个是皮带,一个是其他的驱动机构。为的在第一个模型中,我们对带节点进行离散化S由然后是弹簧和阻尼器,节点位置对时间的判断是确定的各节点的力平衡。图1显示了皮带的离散化和作用在皮带上的力节点[1],和方程1为各节点受力总和。
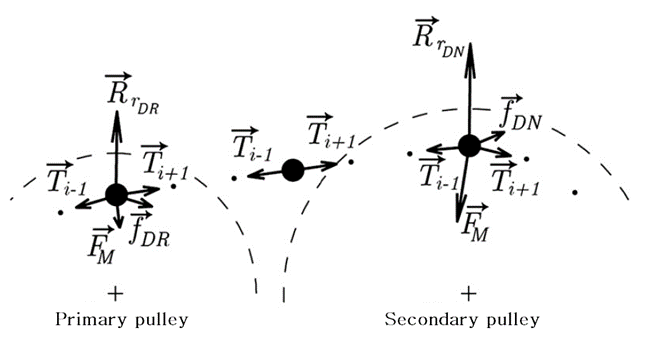
图1:作用在节点上的力[1]

用每个节点的力的总和除以质量,就得到了运动的动力学方程。对方程2在时间上积分两次,我们可以找到节点的位置值。

因此,有的主滑轮输入旋转数据,滑轮上的轴向力,以及传递给系统的阻力转矩,我们能够…找到每一个的位置和速度离散节点和因此确定上的旋转和扭矩E副滑轮。
We使用机械式无级变速器在巴哈,所以的力量平衡泉水和在飞重物下产生的离心力发动机的转动给出了开车轴向力,图2,哪一个是否输入皮带型号。因此,我们开发了一个控制机构的模型,并将该系统与皮带代码耦合。

图2:主滑轮上的自由体图
这样,我们就有了构建脚本的所有模型。图3中的流程图显示了算法的逻辑顺序。输入初始值条件下,我们计算了力的平衡,还有龙格库达采用求解微分方程的方法,输出分析了副滑轮的换挡曲线、转矩,以及皮带的位置。

图3:算法的逻辑序列
这样,我们就有了一个能够感知无级变速器控制参数变化的模型这样我们就可以分析了他们的干扰结果在联轴器转速,输出转矩,还有换档比。因此,设置的过程我们的汽车更快,更便宜,因为我们可以开车在MATLAB中使用几种组合这在实验上是不可能的。
结果与结论
R运行完整模型可以执行几个分析。在视频1中,就有可能分析连续变化时的传输行为转变比率。正如预期的那样,驱动控制机构产生的轴向力的应用引起紧侧张力和松侧张力,从而产生扭矩传递到次级滑轮。
视频1:连续变速时皮带牵引
皮带两侧的张力差异可以在沿节点的牵引力分布中清楚地看到,如图4。T他地区红色为节点主滑轮,蓝色的上的节点副滑轮,和在将滑轮外的节点涂绿。

图4:沿节点的牵引力分布-主滑轮上的节点(红色),次滑轮上的节点(蓝色),滑轮外的节点(绿色)。
传动过程中的松弛动力学行为分析是非常有用的,因为它可以表征传动效率,而传动效率受皮带和滑轮之间的滑移的影响很大。这种行为是不可能的分析在静态模型中,不需要对皮带进行离散化。
的dri时间比曲线,图5,对我们来说非常重要,因为这个试验传输变化决定的一个汽车的加速特性。这条曲线作为输入用纵向动力学算法计算出汽车的速度和加速度。

图5:随时间变化的传动比
通过在我们项目的尺寸计算中实施该模型,可以模拟实验中不可能实现的条件。此外,它还提供了我们的伟大进化关于无级变速器动态特性的理论知识,而参数又是怎样的刚度,质量,惯性,预张力会影响汽车的纵向动力学。
未来的范围
为了继续我们的工作,我们打算将该算法应用到团队已经开发的汽车纵向动力学模型中。因此,在MATLAB中编写同样的程序,将有可能分析CVT调节参数对整车整体加速行为和速度的干扰。除了,我们希望在未来进行基于固定变量的控制参数的优化分析,来有的开发我们自己的CVT设计优化应用于BAJA比赛的知识。
获取更新在我们的进展或接受任何问题年代关于我们的动态CVT模型请随时与我们联系链接艾丁或者是团队的Instagram。
谢谢你的阅读,我希望你喜欢它。干杯!
参考文献
[1]胡里奥,g;普兰特,js。一个experimentally-val格式化橡胶带的模型cvt力学。机械与机械理论《每个理论》第46节,第1037-1053页08年2011。






评论
要发表评论,请点击此处2017-07-29 13:313:00