主要内容
运动计划
路径指标,RRT路径规划仪,路径跟随
使用运动规划来规划环境中的路径。您可以使用常见的基于抽样的规划器,如RRT、RRT*和Hybrid A*,或者指定您自己的可定制路径规划接口。使用路径度量和状态验证来确保您的路径是有效的,并且有适当的障碍物清除或平滑。使用纯追踪和矢量场直方图算法遵循您的路径和避免障碍。
功能
主题
详细介绍了不同路径和运动规划算法的好处。
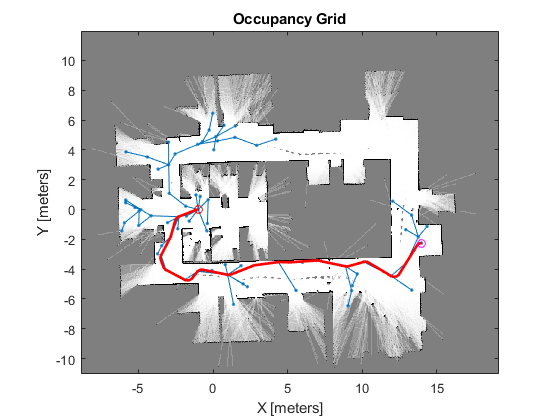
这个例子展示了如何使用快速探索随机树(RRT)算法来规划通过已知地图的车辆路径。
这个例子展示了如何规划一个路径来移动笨重的家具在一个狭窄的空间避免杆。
为一个掌握动作Kinova Jaco辅助机器人手臂使用快速探索随机树(RRT)算法。
这个示例展示了如何使用测距仪和a *路径规划器对仓库地图执行动态重新规划。
此示例显示了如何模拟用于高速公路驾驶场景的自动通道更换机动系统。
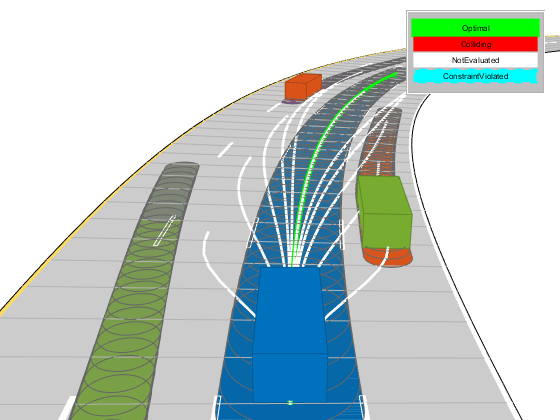
此示例演示如何在高速公路驾驶场景中规划局部轨迹。
此示例显示如何在城市场景中执行动态重新扫描trajectoryoptimalfromet..
这个示例向您展示了如何使用Frenet参考路径在城市驾驶场景中执行动态重规划。
这个例子向您展示了如何使用Simulink来避免障碍,同时遵循一个差金宝app动驱动机器人的路径。
此示例显示如何使用ROS Toolbox和Turtlebot®与矢量字段直方图(VFH)在环境中驾驶机器人时执行障碍避免。
VFH算法细节和可调属性。
纯追求控制器功能和算法详细信息。
特色的例子


您还可以从以下列表中选择一个网站: