调整PID控制器以支持参考跟踪或干扰抑制(PID调谐器)
该示例显示了如何调整PID控制器以减少参考跟踪的过冲或改善植物输入处的干扰抑制。使用PID调谐器应用程序,该示例说明了PI和PID控制系统中的参考跟踪和扰动性能之间的权衡。
在这个例子中,你将工厂代表为一个线性时不变模型.有关使用的信息PID调谐器调一个PID控制器在Simulink中块金宝app®模型中,看到Tune PID控制器以支持参考跟踪或干扰抑制(金宝app仿真软件控制设计).
考虑下图的控制系统。

在这个例子中的工厂是:
参考跟踪是在y发出信号r.干扰抑制是在y的信号d.当你使用PID调谐器为了调整控制器,您可以根据应用程序的需要调整设计以支持参考跟踪或干扰抑制。
初始PI控制器设计
具有初始控制器设计提供了基线,您可以根据您调整PI控制器进行比较结果。使用PID调谐命令为工厂创建初始PI控制器设计Pidtune..
[1, G =特遣部队(0.3,0.1,0]);%植物模型c = pidtune(g,'pi');
使用初始控制器设计打开PID调谐器.
pidTuner (G、C)

添加输入干扰抑制的步进响应图。选择添加图画>输入干扰抑制.

PID调谐器将干扰抑制图与参考跟踪图平铺。

提示
使用选项视图TAB来改变PID调谐器显示多个情节。
默认情况下,对于给定的带宽和相位余量,PID调谐器调谐控制器以在参考跟踪和干扰抑制之间实现平衡。在这种情况下,控制器在参考跟踪响应中产生一些过冲。在初始峰之后,控制器还抑制了与参考跟踪更长的沉降时间的输入干扰。
调整瞬态行为
根据您的应用程序,您可能想要改变引用跟踪和干扰抑制之间的平衡,以有利于其中一个或另一个。对于PI控制器,您可以使用瞬态行为滑块。将滑块向左移动以提高抗干扰能力。初始控制器设计的响应现在显示为基线反应(虚线)。

将瞬态特性系数降低到0.45会加快对干扰的抑制,但也会增加参考跟踪响应的超调量。
提示
右键单击参考跟踪图并选择特征>峰值响应来获得超调量的数值。
移动瞬态行为滑块向右,直到参考跟踪响应的超调最小。

将瞬态行为系数增加到0.70几乎消除过冲,但导致极其缓慢的扰动抑制。你可以尝试移动瞬态行为滑块直到您在适合您的应用程序的参考跟踪和干扰拒绝之间找到平衡。改变滑块对平衡的影响取决于植物模型。对于一些植物模型,效果并不像该例子所示那样大。
改变PID调优设计焦点
到目前为止,当你改变瞬态行为系数时,控制系统的响应时间保持不变。这些操作相当于固定带宽和改变系统的目标最小相位裕度。如果你想固定带宽和目标相位裕度,你仍然可以改变参考跟踪和干扰抑制之间的平衡。为了调整一个支持干扰抑制或参考跟踪的控制器,你改变设计重点的PID整定算法。
改变这一点PID调谐器控制系统中可调参数越多,设计焦点越有效。因此,与PI控制器一起使用时,效果不大。要查看其效果,请将控制器类型更改为PIDF。在类型菜单中,选择PIDF.

PID调谐器自动设计新类型的控制器PIDF。移动瞬态行为滑块将系数设置回0.6。
通过单击“将此新设计保存为基线设计”出口箭![]() 并选择
并选择另存为基准.

PIDF设计将原始PI设计替换为基线图。
与PI案例一样,初始PIDF设计余额参考跟踪和干扰抑制。同样在PI案例中,控制器在参考跟踪响应中产生了一些过冲,并抑制了具有类似沉降时间的输入干扰。

改变PID调谐器设计重点是在不改变响应时间或瞬态行为系数的情况下有利于参考跟踪。为此,请单击![]() 选项,在焦点菜单中,选择
选项,在焦点菜单中,选择参考跟踪.

PID调谐器以参考跟踪性能为重点,自动返回控制器系数。

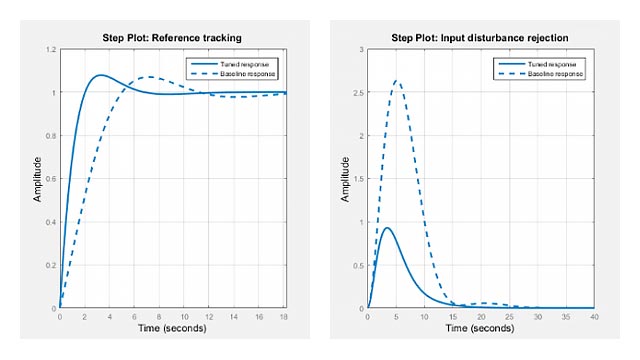
通过参考跟踪焦点调整的PIDF控制器显示为调谐响应(实线)。从图中可以看出,与平衡控制器设计相比,所得到的控制器跟踪参考输入的超调量要小得多,而且稳定时间也快得多。然而,这种设计的抗干扰性要差得多。
改变设计重点以偏爱扰乱抑制。在![]() 选项对话框中焦点菜单中,选择
选项对话框中焦点菜单中,选择输入干扰抑制.

这种控制器设计提高了抗扰性,但导致参考跟踪响应的超调量增加。
使用设计焦点选项时,您仍然可以调整瞬态行为滑块用于进一步微调两个性能指标之间的平衡。同时使用设计焦点和滑块来达到最佳的性能平衡,以满足您的设计需求。这种微调对系统性能的影响很大程度上取决于工厂的特性。对于一些植物,移动瞬态行为滑动条或改变焦点选择权的作用很小或没有作用。
相关话题
您还可以从以下列表中选择一个网站: