传感器融合和跟踪工具箱
设计、模拟和测试多传感器跟踪和定位系统
传感器融合与跟踪工具箱™ 包括用于设计、模拟和测试系统的算法和工具,这些系统融合来自多个传感器的数据,以保持态势感知和定位。参考示例为监视和自主系统(包括机载、星载、陆基、舰载和水下系统)的多目标跟踪和传感器融合开发提供了起点。
您可以融合来自真实世界传感器的数据,包括主动和被动雷达、声纳、激光雷达、EO/IR、IMU和GPS。您还可以从虚拟传感器生成合成数据,以在不同场景下测试您的算法。工具箱包括多目标跟踪器和估计过滤器,用于评估结合了网格级、检测级和目标或轨道级融合的体系结构。它还提供了指标,包括OSPA和GOSPA,用于验证地面实况场景的性能。
对于模拟加速或快速原型,工具箱支持C代码生成。金宝app
开始:


免费白皮书
自主系统的传感器融合与跟踪
空域监视
使用来自主动和被动传感器(如雷达、ADS-B和EO/IR传感器)的数据跟踪多个目标。自定义跟踪器以处理机动对象。

以地球为中心来跟踪飞机。

使用开普勒运动模型跟踪太空碎片。
单一传感器跟踪
建模和仿真多目标跟踪器,以执行智能传感器所需的处理。这包括将原始数据转换为对象轨道列表。
集中式融合
使用集中跟踪器跟踪扩展的目标,该跟踪器融合来自多个传感器和传感器模式的数据。使用概率假设密度(PHD)跟踪器来估计运动物体的运动学,以及物体的尺寸和方向。对于复杂的城市环境,实现一个基于随机有限集(RFS)网格的跟踪器来跟踪每个网格单元的占用及其运动学。
Track-Level融合
融合来自多个跟踪源的轨迹,以提供更全面的环境评估。评估具有带宽限制的系统和采用谣言控制以消除陈旧结果的系统中的迹对迹融合架构。
估计滤波器与数据关联
使用丰富的估计滤波器库估计对象状态,包括线性和非线性卡尔曼滤波器,多模型滤波器和粒子滤波器。找出二维分配问题或S-D分配问题的最佳或k-最佳金宝搏官方网站解。将检测分配给检测,将检测分配给轨道,或将轨道分配给轨道。

使用非高斯滤波器的纯距离跟踪。
多目标跟踪器
将估计过滤器、分配算法和跟踪管理逻辑集成到多目标跟踪器中,将检测融合到跟踪中。将您的传感器数据转换为检测格式,并使用全球最近邻(GNN)跟踪简单的场景。可以轻松切换到联合概率数据关联跟踪器(JPDA)、多假设跟踪器(MHT)或PHD跟踪器,以应对一些具有挑战性的场景,如跟踪测量存在模糊的近距离目标。
扩展对象和基于网格的跟踪器
使用PHD跟踪器来跟踪扩展对象的运动学、大小和方向。利用激光雷达和雷达点云等高分辨率传感器数据,采用基于网格的RFS跟踪器进行跟踪,估计复杂城市环境中网格单元的动态特征。
Track-Level融合
由跟踪传感器或其他跟踪融合对象产生的熔丝轨迹。在带宽受限的系统中构建分散跟踪系统。减少谣言传播以消除陈旧的跟踪结果。
融合体系结构
探索跟踪器体系结构,评估跟踪融合、中央级跟踪或混合跟踪体系结构之间的设计权衡。使用静态(检测)融合结合仅角度和仅距离传感器的检测,如红外、ESM或双基地雷达。

跟踪采用分布式同步无源传感器。
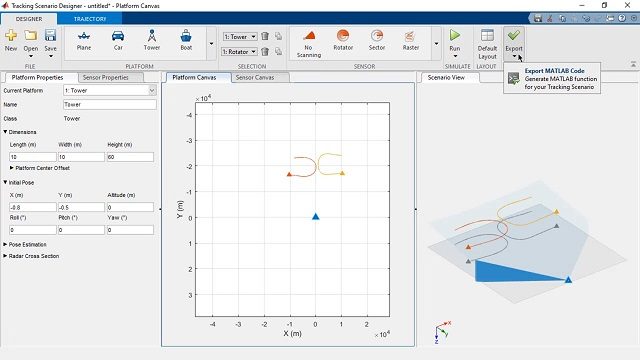
目标轨迹与姿态生成
与跟踪场景设计师应用程序交互定义场景,并生成MATLAB脚本,定义和转换真实的位置,速度,和不同参考框架中的对象的方向。
主动和被动传感器模型
模拟主动传感器(包括雷达、声纳和激光雷达)以产生对目标的探测。模拟机械和电子扫描的方位,仰角,或两者。模型雷达警告接收机(RWR),电子支持措施(ESM),被动声纳和红外传感器产生仅角度探测用于跟金宝app踪场景。模型多基地雷达和声纳系统与发射器和传感器。
蒙特卡罗模拟
使用不同的随机噪声值进行蒙特卡罗模拟。干扰地面真实值和传感器配置,以增加测试的稳健性。
INS传感器模型
型号惯性测量单元(IMU)、GPS、高度计和INS传感器。调整环境参数,如温度和模型的噪声特性,以模拟真实环境。

建立IMU和GPS传感器模型,测试惯性融合算法。
方位估计
熔断加速度计和磁力计读数来模拟电子罗盘(eCompass)。引信加速度计,陀螺仪和磁力计读数与一个姿态和航向参考系统(AHRS)滤波器估计方向。
姿态估计
使用惯性传感器和GPS估计有或没有非完整航向约束的姿态。在没有GPS的情况下,通过高度计或目视里程计融合惯性传感器来确定姿态。

视觉惯性里程计使用融合IMU和相机数据。
场景可视化
绘制物体的方向和速度,地面真实轨迹,传感器测量,和三维轨迹。情节检测和跟踪不确定性。可视化轨道id与历史轨迹。

多平台场景的戏剧情节。
传感器和跟踪指标
生成轨道建立、维护和删除指标,包括轨道长度、轨道中断和轨道ID交换。利用位置、速度、加速度和偏航率均方根误差(RMSE)或平均归一化估计误差平方(ANEES)估计航迹精度。使用集成的OSPA和GOSPA度量来总结单个分数的性能。利用Allan方差分析惯性传感器噪声。
优化过滤器和跟踪器
调整多目标跟踪器的参数,如分配阈值、过滤器初始化函数、确认和删除阈值,以最大化性能。比较跟踪器和跟踪器配置的结果。自动调整INS滤波器,以优化噪声参数。
代码生成
生成C/ c++和MEX代码的模拟加速或桌面原型使用MATLAB编码器™. 应用成本计算阈值以减少计算分配成本所花费的时间。