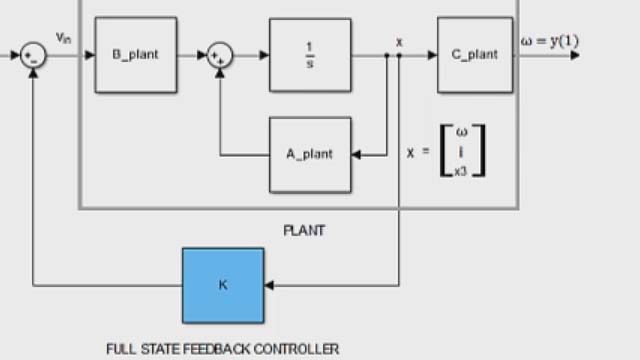
在控制系统工程中有两个非常重要的问题:你的系统是可控的吗?它是可观察到的吗?假设你有一个很好的系统线性模型,你可以用一些简单的矩阵运算和状态空间模型的a、B、C矩阵来回答这两个问题。
不过,我的经验是在航空航天行业,老实说,我从来没有在工作中使用过这些方程来分析我的系统。我并不是说其他行业或航空航天领域的其他系统不会使用它们。只是,在我做过的项目中,我们主要依靠的是对系统有一个很好的理解并通过设计推理来确定它是可控制的还是可观察的。
但话又说到这里,为了发展这种直觉你必须理解可控性和可观察性的概念而获得这种理解的一部分是来自于研究这些方程,所以它们值得花点时间研究。只是不在这个视频里;我们就不讲了,我想这是有原因的。我觉得Steve Brunton在他的《Control Bootcamp》系列中描述了这些方程式背后的数学,我想从一个更直观和概念性的方向来探讨这个话题。这样,结合数学,你们会对可控性和可观察性有更深的理解我认为这将帮助你们成为一个更好的控制系统工程师。
我是Brian,欢迎来到MATLAB技术讲座。
首先,让我们看看控制系统设计在一个非常高的层次上需要什么。它从你想要控制的系统开始。你可以通过传递控制力和能量的执行器来戳和刺激系统。你可以测量系统的特定状态,比如电压,位置,温度,用产生系统输出的传感器。控制器设计归结起来就是要弄清楚如何使用传感器数据以及参考信号或某种命令来生成正确的执行器命令。这就是我们要做的。
然而,如果系统没有适当的驱动器来影响系统的正确部分,或者没有适当的传感器来测量正确的状态,那么控制器设计注定会失败。没有这两者,你将无法充分影响系统,它将无法控制,或者你将无法知道系统是如何变化的;它不会被观察到。通过这种方式,可控性和可观测器是系统如何与驱动器和传感器一起工作的条件,而不依赖于特定的控制技术,如PID或极点配置。如果无法控制,你必须通过改变系统或驱动器来解决这个问题,对于可观察性和传感器也是如此。
我们来看看这两者的正式的书面定义。可控性意味着存在控制信号,允许系统在有限的时间内达到任何状态。这也被称为可达性。现在,需要意识到的一件重要的事情是,可控性并不意味着状态必须维持或保持在那个条件下——只是它可以达到。
为了理解这意味着什么,让我们看一个很好的约束问题,比如单轨。有两种状态:位置和速度。我们假设单轨是可控的,通过加速和刹车,单轨可以到达轨道上的任何位置,它可以在状态空间内加速到任何速度。以下是可达性的关键:不仅每个状态变量可以单独实现,每个变量组合也可以实现。例如,我们可以以50千米/小时的速度加速到1千米的位置。因此,它可以在状态空间中达到那个状态。然而,很明显,保持这种状态在物理上是不可能的。这就是为什么可控性要求系统能够到达任何状态,但不一定要保持它。
好了,让我们来看看可观察性。可观测性是指系统的所有状态都可以从系统的输出中得知。也就是说,通过适当选择传感器和传感器位置,我们可以知道系统中每个状态的值。不过,这里有一个简短的边注。正如我在上个视频中提到的极点放置,要求你知道系统中的每个状态是不切实际的。它们太多了,而且大多数都不会以任何有意义的方式影响系统。例如,单轨的温度是一种状态,但知道它对控制位置和速度是不必要的。所以当我说状态时,我指的是所有的临界状态。通常,关键状态是模型状态向量中的状态,因为建模的目标通常是只包含相关的动态,而忽略其余的动态。因此,对于可观测性,我们想知道状态向量中的每一个状态。
好了,有了这些定义,我们看看能不能通过看一些例子让这些概念更有意义。
现在,让我们抛开单轨约束问题,看看汽车的高维状态空间。我们关心的状态是,x, y位置,x, y速度,偏航角和偏航率。假设我们的传感器有一个速度计来测量速度我们自己的眼睛来评估其他一切。执行器是方向盘、油门和刹车踏板。它本质上是当你驾驶汽车时使用的驱动器和传感器,因此我们可以推断,通过这个设置,我们能够以给定的速度和偏航角度控制汽车到一个特定的位置。
让我们先来看看可观察性的概念,并从一个极端的例子开始,以帮助说明它的重要性。我们闭上眼睛就能清除所有的传感器信息。这有使C矩阵归零的效果基本上我们没有办法知道任何状态。你不知道你在哪里,你前进的速度,或者你面对的方向。在这个例子中,我们假设你感觉不到加速度或者听到引擎的声音。现在你仍然可以控制汽车;因为你可以移动方向盘并踩下踏板,所以不会受到影响。在这种情况下,缺乏可观察性使得你无法控制汽车也就是说你无法安全驾驶它到达目的地并知道自己到达了目的地。然而,在我们之前设定的定义内,汽车是可控的。所以当你谈论控制和可控性的时候要记住这一点。
现在让我们想象相反的情况。我们移除了方向盘和踏板,这有消除B矩阵的效果。你可以想象一下,如果你撞到一块很大的冰地,汽车在没有转向或刹车的情况下打滑,会发生什么情况。即使你不能影响汽车的状态,这个系统仍然是可观察的,因为你可以看速度计和跟踪你的位置,从外面看。
所以你可以看到有一个能够被观察和控制的系统是多么的必要。他们一起工作。我的意思是,没有任何驱动器或传感器系统注定会失败,这应该是很明显的,但一开始可能不明显的是,即使一个部分不可控或不可观察的系统仍然是麻烦的。
想象一下,你试着在没有方向盘的情况下开车。即使你仍然可以通过踏板来改变速度,我打赌你仍然会认为这是一辆无法控制的车,因为你没有办法改变偏航状态。这是所有控制系统的共同感受。如果任何一个临界状态是不可控制的,那么整个系统就被认为是不可控制的。如果任何一个临界状态是不可观测的,那么整个系统就被认为是不可观测的。
好了,现在让我们关注观察一个状态意味着什么。显然,直接测量一种状态是了解它的一种方法。然而,我们不必测量每个状态来推断它的值。能够利用可用信息估计一个状态,就足以宣称该系统是可观测的。
例如,在单轨列车上,我们不需要安装速度计和位置传感器来了解这两种状态。速度可以通过位置的微分来估计,位置可以通过速度的积分来估计。所以你只需要测量其中一种状态就可以推断出另一种状态。这就是为什么即使输出y不是满状态,系统仍然是可观察的。也就是说,它不包含对每个状态变量的直接测量。
估计状态是降低系统硬件复杂性的好方法。有策略地用传感器只测量必要的状态,然后你可以用像卡尔曼滤波这样的观测器估计其余的状态。
话虽如此,即使您可以估计一个状态,有些状态可能对建模和测量误差高度敏感。例如,区分一个嘈杂的位置会产生一个更嘈杂的速度。或者速度测量中的一个小偏差会导致位置误差不断增大。
所以我们有这个权衡。观察可能对错误很敏感,但在整个系统中添加额外的传感器在成本、重量、复杂性或任何对设计很重要的指标上都可能很昂贵。所以我们需要找到一种方法来平衡这种权衡。我们应该衡量哪些州,哪些州应该估计?如果你的系统很难进行推理,可观察性方程提供了一种系统的方法来评估是否可以从给定的输出中观察到状态,并衡量其有效性。所以你有办法确定你是否在正确的地方有正确的传感器。
这里我还想讲一些东西,为了做到这一点,让我们考虑一个柔性悬臂梁。如果你想象把光束的一端往下拉让它弹回来,它会以某种方式振动这是由光束的机械特性决定的最终在所有的能量都衰减后,它会自己静止下来。你的工作是开发一种主动阻尼系统能更快地停止振动。
你可以使用加速度计来测量运动和执行器,执行器通过阻尼器移动一个反质量来从系统中移除能量。为了简单起见,我们说一个传感器和执行器是放在一个单独的包里的,所以它们必须放在相同的位置,但是你把它们沿着光束放在哪里取决于你。除了你不能把它放在横梁的顶端因为其他的工程限制。
所以问题是,你应该把它放在哪里以及这种放置对可控性和可观察性有什么影响?嗯,我们可能会认为,当我们接近光束的顶端时,光束的运动就会更大。因此,如果我们将硬件尽可能地靠近末端,它将为传感器产生最多的运动,因此它将更容易感知,并允许执行器阻尼更多的能量。从视觉上看,这是可行的。
然而,梁的运动由许多不同的弯曲模态组成。第一个弯曲模态像你期望的那样上下波动,然后第二个和第三个模态有稍微复杂的模态形状。但需要注意的是,我们的传感器和驱动器的位置是直接放置在节点的第二弯曲模式。在这种情况下,我们最初的理想位置对于第一和第三种弯曲模式是非常理想的,但使第二种弯曲模式都是不可观测的,因为传感器不会测量任何运动,而且无法控制,因为执行器对这种模式没有影响。
如果我们用这个硬件位置设计一个控制器,我们会发现无论我们如何调整控制器或想出有趣的数学方法,光束仍然会以第二种弯曲模式振动。
因此,与其在适合第二种弯曲模式的位置添加第二个传感器和执行器,还不如将传感器和执行器移动到一个可以观察和控制所有关键弯曲模式的位置。然而,在这样做的过程中,我们降低了控制第一模态的能力,并增加了驱动成本,因为对于第一弯曲模态,梁在这个新位置上的物理移动并不多。也就是说,我们的致动器从这个位置倾倒第一种模式要比从另一个位置倾倒更多的努力。因此,我们可以处理前三种弯曲模式,但以效率为代价。不过,也许这是一个很好的妥协。
希望你现在能更好地理解为什么可控性和可观察性是你在分析系统、驱动器和传感器时需要理解和考虑的概念。
我之前展示的方程提供了一种系统的方法来评估我刚才所说的一切。它们可以检查可观察性和可控性,帮助你考虑最有效地添加传感器和驱动器的地方,并决定你应该测量哪些状态,哪些状态应该估计。
再说一遍,我认为详细理解这些方程以及如何在MATLAB中执行这些分析是很重要的因为即使你不使用它们,它也会是你建立直觉的一个很好的基础。MathWorks提供了一个页面,其中有视频和其他资源的链接,展示了如何分析可控性以及如何使用状态空间模型。如果你想了解更多关于为什么这些公式有效,一定要看看Steve Brunton的控制训练营视频。我刚刚谈到的所有内容的描述中都有链接。
如果你不想错过下一个Tech Talk视频,别忘了订阅这个频道。此外,如果你想看看我的频道,控制系统讲座,我也涵盖了更多的控制理论主题。谢谢收看。下次见。