手中具有直观控制和感受的仪器是所有外科医生的关键要求。对于腹腔镜外科医生,通过5至15毫米切口执行程序,这些仪器至关重要。
需要多次设计迭代才能完善腹腔镜设备的控制和感觉。每次设计修改可能需要数周时间才能实施,这使得传统的设计工作流程变得不可行。在Ethicon Endo Surgery,Inc.公司,我们采用了基于模型设计的快速原型工作流程,使我们能够实施和测试新的设计参考在几分钟内完成任务,并将总体开发时间缩短几个月。
使用此工作流程,我们在短短三个月内为下一代内窥镜手术订书机设计并构建了原型。我们用matlab.®和模拟金宝app®对订书机的电机和控制进行建模和仿真,然后使用嵌入式编码器生成目标快速原型代码®使用这种方法,我们能够创建一个外科医生感到舒适、稳定和直观的原型,同时改进系统需求,为进入生产做准备。
从缝合线和订书钉到嵌入式控件
大多数手术涉及三个常见步骤:制作切口,将组织夹在切口周围,并缝合组织。在腹腔镜手术中,这些步骤通过微小切口进行,通常使用内窥镜切割器订书机或内窥镜,其使用钉代替缝合线来关闭切口。在20世纪70年代开发,第一个内心需要外科医生应用相当大的手动力,导致疲劳。2011年,Ethicon推出了该行业的首款动力内筒,带有按钮的按钮,提高精度和稳定性(图1)。

图1所示。Ethicon的ECHELON FLEX™驱动的ENDOPATH®订书机。
基于模型的endocter电机控制设计
Ethicon的机械工程师开发了最初的电动内切割器,在该设备的机械方面拥有相当丰富的专业知识。然而,我们在开发嵌入式控制系统方面的经验相对较少。在过去需要控制软件的项目中,我们通常将原型开发工作外包。这种方法不仅对最初的原型很慢,而且对随后的设计修订也很慢。也很难将我们关于该设备如何工作以及外科医生如何使用的内部知识转化为一系列明确的要求。更重要的是,我们从这个过程中学到的东西很少,所有关于控制系统关键功能的见解都是由第三方开发人员获得的。
通过使用基于模型的新endocter设计,我们将能够将我们的机械和生物医学领域的专业知识直接应用于电机控制器的预生产原型的开发。
表征电机并构建控制模型
我们的第一项任务是在Simulink中开发电机的工厂模型。我们首先将电机连接到运行TI F28335处理器的试验板上。我们为处理器部署了一金宝app些简单的代码来刺激马达,并在马达旋转时对其进行测量。接下来,我们使用Simulink设计优化™ 导入测量数据并对设备模型执行参数估计。Simulink设计优化自动解决了电机转矩常数、动态摩擦、惯性矩和许多其他非线性模型参数的优化问题,这些参数通常需要很长时间才能准确表征。后来,我们对模型进行了改进,以考虑齿隙,并扩展了植物模型,以包括切割器工作的组织环境。
一旦我们进行了准确的工厂模型,我们就开始使用Simulink和StateFlow建模控制系统金宝app®(图2)。
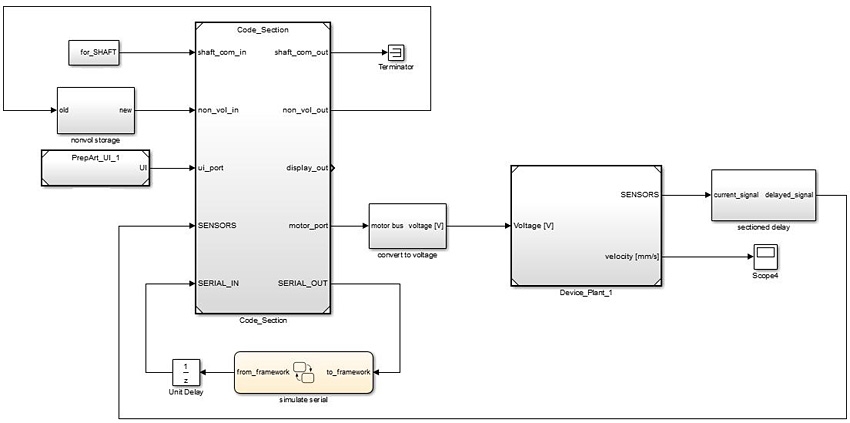
控制输入包括14个开关以及传感器,用于测量电机上的电流消耗、电机上的压降以及传动系的位置。通过Simulink,我们对传感器进行了建模金宝app2C接口,和一个用于控制电机的脉宽调制器。我们使用statflow在控制器中建模状态转换。利用状态空间设计方法和MATLAB软件开发了一种补偿器。
在Simulink中运行闭环仿真以验证和完善控制设计后,我们使用Embedded 金宝appCoder从模型生成C代码。编写并部署代码到TI C2000电路板上,并使用实际电机进行实时测试。
整合来自外科医生的反馈
我们的初始硬件测试确认了我们在模拟中看到的内容:电机控制器在命令时精确地定位了设备。然而,这一成就只是前身更重要的测试,它开始了我们开始使用实验室中的设备。
实际上使用了内舱,我们可以在某些动作期间移动太快或者对于其他人来说太慢而感到舒服。我们在Simulink,再生代码中调整了控制模型,并在设计迭代中快金宝app速更新了嵌入式软件,直到内腔感应响应和自然到我们的团队。
然后我们邀请外科医生来测试这个设备,并给出他们的反馈,我们使用相同的快速迭代循环将反馈整合到设计中。在外科医生提出建议的几分钟内,我们就有了一个更新的控制系统,可以进行测试。基于模型的设计使得进行这种微调变得很容易。如果我们将设计外包,那么每次迭代都可能需要数周甚至数月的时间。
构建接近生产的原型
我们的第一个原型设计有一个相对高性能的处理器和多个高分辨率传感器。为了准备使用更便宜的组件进行生产,我们开始设计第二个原型,使用与生产中使用的类型相当的硬件,包括功率更适中的Cortex-M4处理器和单个低分辨率传感器。在等待组装带有这些组件的电路板时,我们修改了Simulink控制器模型以反映变化。例如,我们使用传感器数据表中的规范来更新传感器的子模型。金宝app
我们的模拟揭示了我们的数字信号处理算法的错误。我们设计了过滤器来消除这个问题,并在硬件准备就绪之前通过模拟验证了修复方案。我们还进行了假设分析,以确定传感器分辨率的下限,使设计仍能满足其亚毫米定位公差。
为了支金宝app持与我们的目标处理器的代码生成,我们与第三方软件开发组合作,开发一个软件框架,执行低级任务以初始化电路板的中断和外围设备。该框架用作使用嵌入式编码器生成的控制器代码和处理器的手编码外设之间的接口层。算法代码的分离和接口层将增强所生成的算法代码的可移植性,如果我们选择实施它在未来不同的嵌入式处理器上。
当新的硬件到达实验室时,我们用Simulink进行的模拟和验证得到了回报。金宝app我们在一周内便创造出了稳定的控制器版本,并根据团队和测试新原型的外科医生的反馈重新开始了实验室优化。
从原型到生产
使用基于模型的设计,我们在大约三个月内完成了第一个概念验证。过去的类似项目,被外包,大约18个月才能完成。更重要的是,我们现在对彻底了解了微妙但重要的设计细节和进入控制器的决定。例如,我们知道,处理器延迟预期多少,电机速度对外科医生最舒适。学习这些详细信息的唯一方法是建立一个原型,为我们提供快速做的唯一方法论是使用基于模型的设计与Simulink。金宝app
对于向生产的过渡,我们计划与一个在开发医疗设备软件方面有直接经验的开发团队合作。我们现在有了编写详细而精确的需求的知识,这将简化实施过程。
同时,我们继续开发和改进原型。我们计划使用MATLAB、Simulink和嵌入式编码器在内部实现更多的软件。金宝app