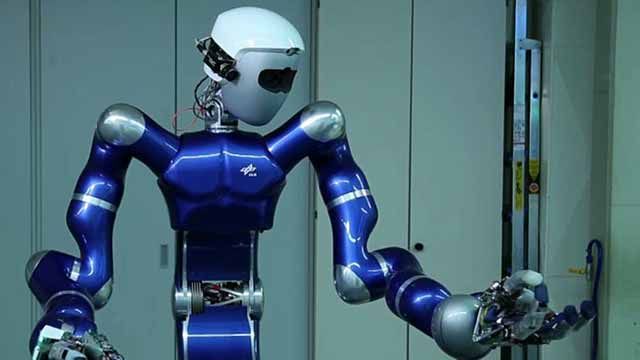
德国中心für Luft- und Rundfahrt (DLR,德国航空航天中心)机器人和机电中心(RMC)的工程师和研究人员正在开发能够学习环境并与环境互动的机器人。其中包括敏捷贾斯汀它是世界上最先进的双臂移动人形机器人之一。敏捷贾斯汀有53个自由度,其中上半身有19个自由度,手部有26个自由度,移动平台有8个自由度。它通过头部的立体摄像头和RGB-D传感器、所有关节处的扭矩传感器以及手指皮肤上的触觉传感器来感知环境。
DLR RMC团队使用基于模型的设计和MATLAB®和仿真软金宝app件®为敏捷贾斯汀开发先进的控制、校准和路径规划算法。
DLR自主学习机器人实验室负责人Berthold Bäuml说:“基于M金宝appATLAB和Simulink的基于模型的设计涵盖了先进机器人系统设计所需的广泛软件领域。”“它能够模拟复杂的机电系统和控制器,实时HIL测试的代码生成,信号和图像处理,以及数据分析和可视化。”