Use State-Space Estimation to Reduce Model Order
Reduce the order of a Simulink®model by linearizing the model and estimating a lower order model that retains model dynamics.
This example requires Simulink and theSimulink Control Design™toolbox.
Consider the Simulink modelidF14Model. Linearizing this model gives a ninth-order model. However, the dynamics of the model can be captured, without compromising the fit quality too much, using a lower-order model.
Obtain the linearized model.
load_system('idF14Model'); io = getlinio('idF14Model'); sys_lin = linearize('idF14Model',io);
sys_linis a ninth-order state-space model with two outputs and one input.
Simulate the step response of the linearized model, and use the data to create aniddataobject.
Ts = 0.0444; t = (0:Ts:4.44)'; y = step(sys_lin,t); data = iddata([zeros(20,2);y],[zeros(20,1); ones(101,1)],Ts);
datais aniddataobject that encapsulates the step response ofsys_lin.
Compare the data to the model linearization.
compare(data,sys_lin);
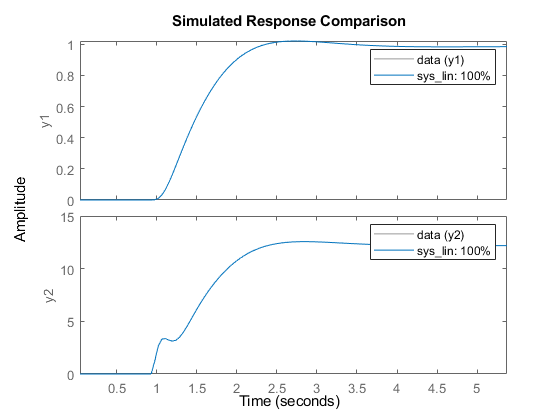
Because the data was obtained by simulating the linearized model, there is a complete match between the data and model linearization response.
Identify a state-space model with a reduced order that adequately fits the data.
Determine an optimal model order.
nx = 1:9; sys1 = ssest(data,nx,'DisturbanceModel','none');
A plot showing the Hankel singular values (SVD) for models of the orders specified bynxappears.
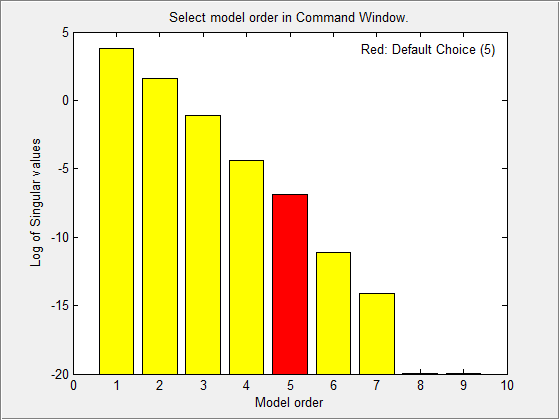
States with relatively small Hankel singular values can be safely discarded. The plot suggests using a fifth-order model.
At the MATLAB®命令提示符,选择模型为美国东部时间imated state-space model. Specify the model order as5, or pressEnterto use the default order value.
Compare the data to the estimated model.
compare(data,sys1);
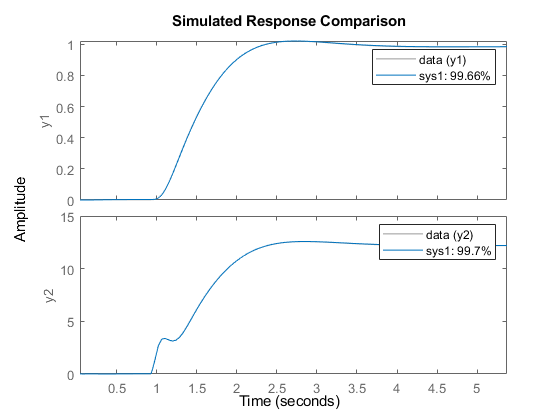
The plot displays the fit percentages for the twosys1outputs. The four-state reduction in model order results in a relatively small reduction in fit percentage.
Examine the stopping condition for the search algorithm.
sys1.Report.Termination.WhyStop
ans = 'Maximum number of iterations reached.'
Create an estimation options set. Specify the'lm'search method. Increase the maximum number of search iterations to 50 from the default maximum of 20.
opt = ssestOptions('SearchMethod','lm'); opt.SearchOptions.MaxIterations = 50; opt.Display ='on';
识别使用估计的状态空间模型option set andsys1as the estimation initialization model.
sys2 = ssest(data,sys1,opt);
Compare the response of the linearized and the estimated models.
compare(data,sys_lin,sys2);
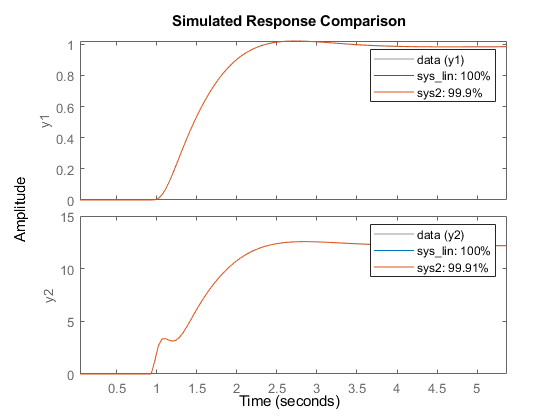
The updated option set results in better fit percentages forsys2.
See Also
linearize(Simulink Control Design)|getlinio(Simulink Control Design)
You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)