六步通勤
生成六步换向无刷DC(BLDC)电动机的开关序列
- 图书馆:
电机控制区块 /控制 /控制参考
描述
这六步通勤block uses a 120-degree conduction mode to generate a switching sequence to implement six-step commutation (or trapezoidal commutation) on a three-phase BLDC motor. You can use the switching signals to operate switches and control the stator currents, and therefore, control motor speed and direction of rotation.
块接受大厅序列号或拿出来r position (from a position sensor such as a Hall or a quadrature encoder sensor) and the direction of torque as inputs. It uses the Hall sequence or position input to determine the sector where the rotor is present. The block computes the switching sequence such that it energizes the corresponding phases to maintain the torque angle (angle between rotor d-axis and stator magnetic field) of 90 degrees (with a deviation of 30 degrees).
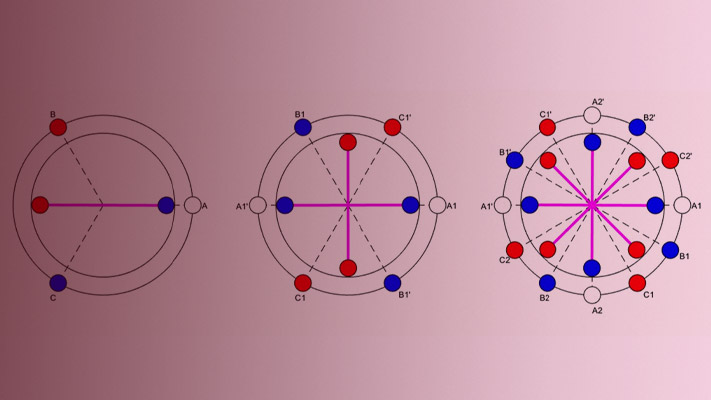
该图是一个示例,该示例显示了定子磁场及其默认霍尔序列。

该块使用基于霍尔序列的换向逻辑来生成开关序列。
| 霍尔州立州(大厅B,厅,厅C) | 切换序列(AA'BB'CC') | ||
|---|---|---|---|
| AA' | BB' | CC' | |
| 5(101) | 00 | 10 | 01 |
| 4(100) | 01 | 10 | 00 |
| 6(110) | 01 | 00 | 10 |
| 2(010) | 00 | 01 | 10 |
| 3(011) | 10 | 01 | 00 |
| 1(001) | 10 | 00 | 01 |
该图显示了定子磁场拟合和可能的扇区(根据输入转子位置确定)。

该块使用基于位置传感器信号的换向逻辑来生成开关序列。
| 位置(θ) | 部门 | 切换序列(AA'BB'CC') | ||
|---|---|---|---|---|
| AA' | BB' | CC' | ||
| (-30°,30°] | 1 | 00 | 10 | 01 |
| (30°,90°] | 2 | 01 | 10 | 00 |
| (90°,150°] | 3 | 01 | 00 | 10 |
| (150°,210°] | 4 | 00 | 01 | 10 |
| (210°,270°] | 5 | 10 | 01 | 00 |
| (270°,330°] | 6 | 10 | 00 | 01 |