用STAP减少杂波和干扰机
这个例子展示了如何使用Simulink®来抑制来自单站雷达接金宝app收脉冲的杂波和干扰。阐述了如何对杂波和干扰进行建模,以及如何使用自适应位移相位中心阵列(ADPCA)脉冲抵消模块来抑制干扰。ADPCA Canceller是相控阵系统工具箱中提供的几个空时自适应处理(STAP)模块之一。有关在Simulink®中建模端到端单站雷达的更多信息,请参阅金宝app在Simulink中模拟雷达接收机的测试信号金宝app的例子。有关STAP的介绍,请参阅时空适应处理导论的例子。
模型的结构
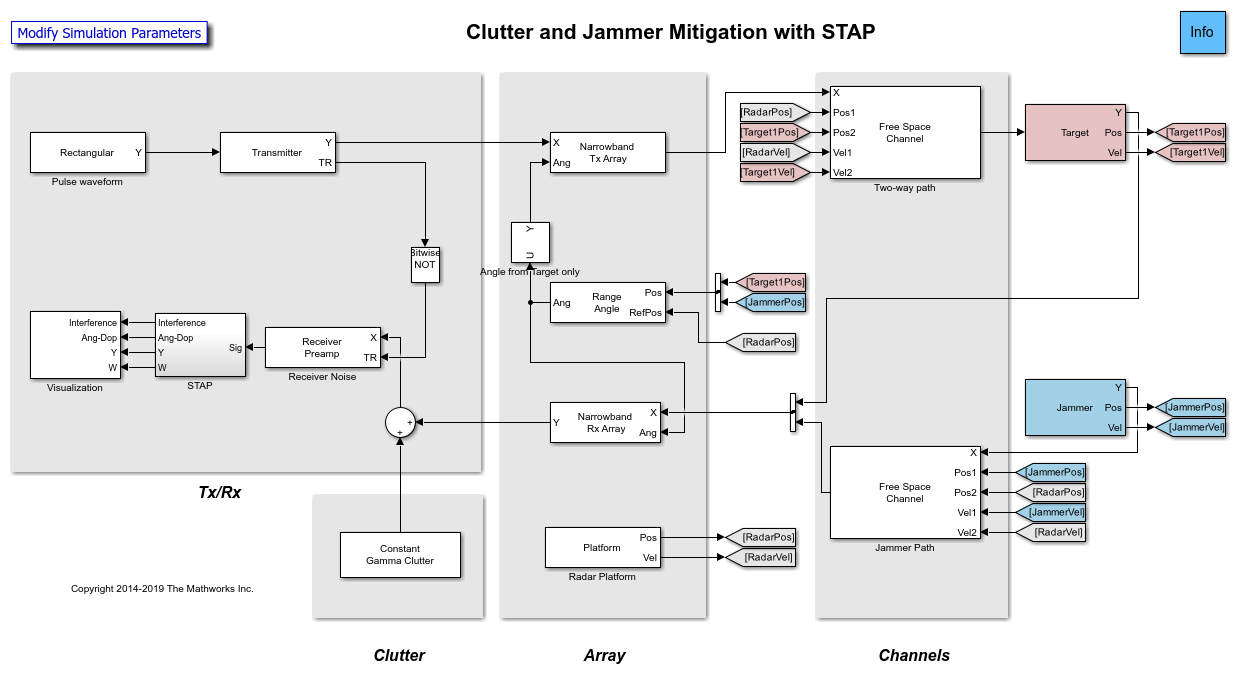
这个例子模拟了一个带有移动目标和一个静止弹幕干扰机的单基地雷达。干扰机通过空闲空间向雷达传送干扰信号。一个带有后折流板单元的六元均匀线性天线阵(ULA)接收来自目标的反射脉冲以及干扰机的干扰。在处理之前,杂波模拟器的输出也被添加到接收信号中。在添加噪声之后,信号被缓冲到一个数据立方体中。在这个例子中,立方体被ADPCA对消器处理在目标的估计距离,方位角和多普勒频移。在实践中,ADPCA抵消器将扫描几个距离,方位角和多普勒偏移,因为目标的速度和位置是未知的。
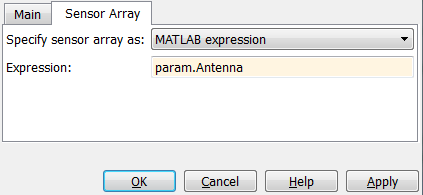
本例中的几个块需要共享相同的传感器阵列配置。这是通过分配一个传感器阵列配置对象到一个MATLAB变量和共享这个变量在传感器阵列选项卡的块的对话框,稍后将显示。
除了在在Simulink中模拟雷达接收机的测试信号金宝app例子中,有:
空闲空间-在块的对话面板上选择双向传播时,执行信号的双向传播。这种模式允许使用一个块而不是两个块来模拟信号的传输和反射传播路径。干扰机-产生阻塞干扰信号。这个子系统还包括一个平台为了模拟干扰机的速度和位置,这是空闲空间块。位置也需要计算目标和干扰机之间的角度。选择器选择目标的角度角范围块。这个角是窄带Tx数组块。常数伽马杂乱产生伽马值为- 15db的杂波。这样的伽马值可以用来模拟被森林覆盖的地形。雷达平台-更新雷达位置和速度。
堵塞
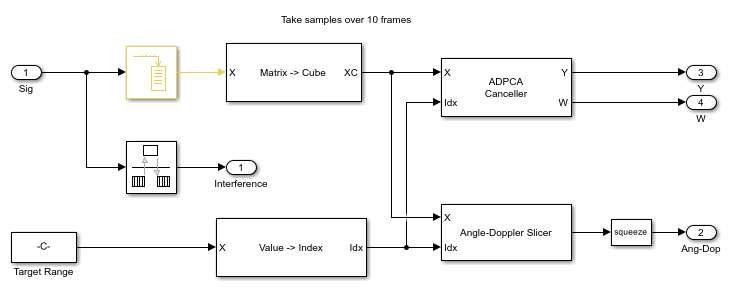
缓冲—缓冲接收信号的10个脉冲。矩阵数据集—将缓冲信号重塑为MxQxN数据立方体。M为快速时间内的距离仓数(一个脉冲的采样数),Q为天线单元数,N为缓冲脉冲数。在本例中,多维数据集的尺寸为200X6X10。价值指数-从范围值计算估计目标的范围bin的索引。ADPCA消除器-沿着指定的距离库执行自适应位移相位中心阵列(ADPCA)脉冲消去。雷达的天线阵列配置使用变量共享传感器阵列块对话框的选项卡。输出是被抑制杂波和干扰的接收脉冲。过滤器的自适应权重也被产生,启用它们是可选的。
角多普勒切片机-沿着对话框参数指定的维度对数据立方体进行切片。这个例子在估计的距离检查立方体的角度多普勒切片。
可视化-这个子系统显示杂波干扰在时域,接收数据的角度多普勒响应,ADPCA抵消器的输出以及权重。
探索的例子
模型的几个对话框参数由helper函数计算helperslexSTAPParam.要从模型中打开函数,请单击修改仿真参数块。该函数在加载模型时执行一次。它将其字段被对话框引用的结构导出到工作空间。要修改任何参数,可以在命令提示符处更改结构中的值,或者编辑helper函数并重新运行它来更新参数结构。
并显示结果
下面显示了不同阶段的模拟。下面的第一个图显示了在天线阵列接收到的信号是如何由杂波返回控制的。由于雷达位于离地面1000米的地方,杂波从地面1000米开始返回。

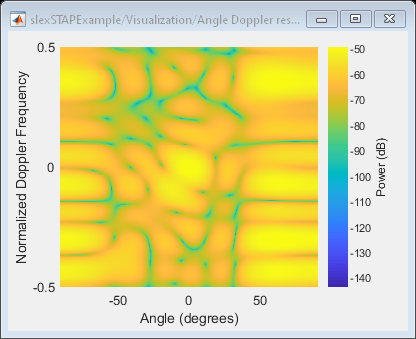
下图显示了估计距离仓的返回的角度-多普勒响应。它将杂波表现为角度和多普勒的函数。杂波回波在角-多普勒空间中表现为对角线。这样的一条线通常被称为杂波脊.接收到的干扰信号是白噪声,以大约60度的角度散布在整个多普勒频谱上。
正如你在下一个图中看到的,ADPCA Canceller的权值沿着杂波脊产生一个深空,也在干扰器的方向。

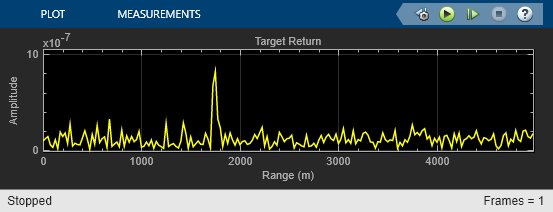
下图显示ADPCA抵消器输出的返回,清楚地显示目标在1750米的距离。接插件干扰机和杂波都被过滤掉了。
你也可以从以下列表中选择一个网站: