PMSM当前控制器
离散时间永磁同步机电流控制器
- 库:
Simscape /电气/控制/ PMSM控制

描述
的PMSM当前控制器块实现转子中的离散时间PI基永磁同步机(PMSM)电流控制器d-问参考范围。
通常在组成控制结构的一系列块中使用此块。
你可以在d-q帧中生成一个当前引用,作为这个块的输入PMSM当前参考生成器.
您可以获得一个电压参考在abc域通过转换输出块使用逆园变换块。
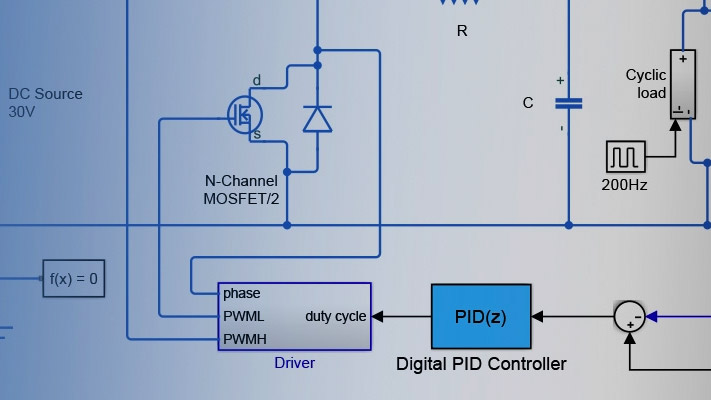
您可以看到一个完整的控制结构的例子,从机器测量到机器输入,在永磁同步电动机磁场定向控制块。
方程
由于其一阶简单性及其稳定性,使用向后欧拉方法离散化块。
两个PI电流控制器在转子参考系中实现,产生参考电压矢量:
和
地点:
和 是d-axis和问-AXIS参考电压。
和 是d-axis和问-AXIS参考电流。
和 是d-axis和问分别设在电流。
Kp_id.和KP_IQ.比例增益是多少d-axis和问分别设在控制器。
Ki_id和Ki_iq是一体化的收益d-axis和问分别设在控制器。
vd_FF和vQ_FF.是前馈电压d-axis和问- 分别从机器数学方程获得并作为输入提供的轴。
T年代为离散控制器的采样时间。
零取消
使用PI控制导致闭环传递函数为零,这可能导致闭环响应中不希望的超调。这个零可以通过在前馈路径中引入一个零抵消块来抵消。离散时间下的零抵消传递函数为:
和
电压饱和
当定子电压矢量超过电压相限时,必须施加饱和度Vph_max.:
在哪里vd和v问是d-axis和问-AXIS电压分别。
在轴优先排序的情况下,电压v1和v2介绍了,:
v1= V.d和v2= V.问为d-AXIS优先级排序。
v1= V.问和v2= V.d为问-AXIS优先级排序。
受约束(饱和)电压 和 获得如下:
和
地点:
和 为不受约束的(不饱和)电压。
v2_MAX.是最大值v2即不超过电压相位限制
在直接和正交轴具有相同的优先级(D-Q等效)的情况下,获得约束的电压如下:
和
在哪里
和
积分抗风
为避免积分器输出饱和,采用了抗上环机构。在这种情况下,集成商的收益为:
和
在哪里Kaw_id和Kaw_iq反清盘的收益是什么d-axis和问分别。
假设
直接和正交轴的工厂模型可以用一阶系统近似。
这种控制方案仅用于具有正弦磁通分布和磁场绕组的永磁同步电机。
港口
输入
输出
参数
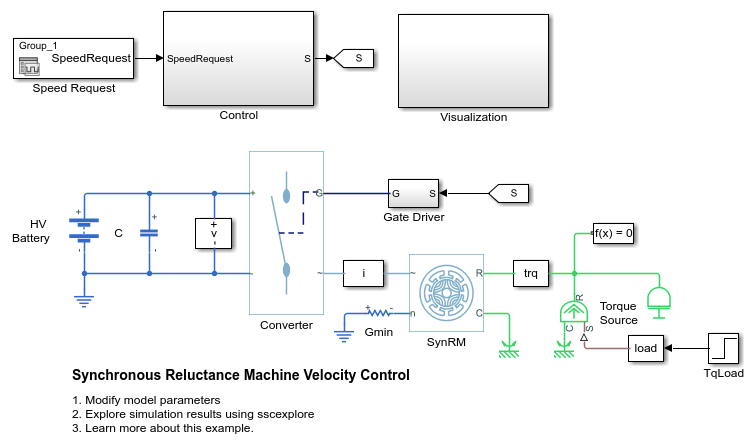
模型的例子
参考
[1] bernard, T., V. F. Montagner, H. A. Gründling, H. Pinheiro。“用于永磁同步电机无传感器矢量控制的离散滑模观测器”。IEEE工业电子产品交易。卷。61,第4,2014页,第1679-1691页。
[2] Carpiuc,S。和C.拉扎尔。“基于永磁同步机的汽车牵引驱动器中的”快速实时约束预测电流控制“。IEEE交通电气化汇刊。第1卷第4期,2015年,第326-335页。
扩展功能
您还可以从以下列表中选择一个网站: