地面杂波缓解与移动目标指示雷达(MTI)
这个例子显示了一个移动的目标指示的设计(MTI)雷达来减轻混乱和识别移动目标。雷达系统,杂乱是指收到环境散射回声之外的其他目标,如陆地、海洋和雨水侵蚀。杂乱回波可以许多数量级大于目标回声。一个MTI雷达利用了相对较高的抑制杂波回波多普勒频率的移动目标,通常有零个或多普勒频率很低。
一个典型的MTI雷达使用高通滤波器来去除能量多普勒频率较低。由于冷杉高通滤波器的频率响应是周期性的,一些能量在高多普勒频率也删除。在这些高目标多普勒频率从而不会被雷达探测到。这个问题被称为盲速问题。这个例子展示了如何使用技术,称为交错脉冲重复频率(脉冲),解决盲速问题。
构造一个雷达系统
首先,定义一个雷达系统的组件。这个例子的重点是在MTI处理,这样的例子使用了雷达系统的例子模拟测试信号对雷达接收机。你可以探索的细节雷达系统设计通过这个例子。改变天线高度100米来模拟雷达安装在建筑物的顶部。注意到系统中脉冲重复频率大约是30千赫,这对应于一个最大明确5公里的范围。
负载BasicMonostaticRadarExampleData;sensorheight = 100;sensormotion。InitialPosition = [0 0 sensorheight] ';脉冲重复频率= waveform.PRF;
检索采样频率,工作频率和传播速度。
fs = waveform.SampleRate;fc = radiator.OperatingFrequency;wavespeed = radiator.PropagationSpeed;
在许多MTI系统,尤其是低端,发射器的电源是一个磁控管。因此,每个发射脉冲发射机添加一个随机相位。因此,常常需要恢复的相干接收机。这些设置被称为相干在接收。在这些系统中,接收机锁到随机的阶段通过为每个脉冲发射机。然后,接收方从样本中删除阶段影响收到相应的脉冲间隔内。接收系统上模拟一个连贯的发射机和接收机通过设置如下。
发射机。CoherentOnTransmit = false;发射机。PhaseNoiseOutputPort = true;接收器。PhaseNoiseInputPort = true;
定义目标
接下来,定义两个移动目标。
第一个目标是位于位置(1600 0 1300)。鉴于雷达位置显示在前面的部分中,它有一个从雷达2公里范围。目标的速度(100 80 0),对应的径向速度相对于雷达-80 m / s。目标的雷达截面25平方米。
第二个目标是位于位置(2900 0 800),对应于一系列从雷达3公里。设定的速度这一目标盲速,在多普勒签名是PRF的别名。这个设置可以防止MTI雷达探测目标。使用dop2speed函数计算盲速有相应的多普勒频率等于脉冲重复频率。
波长= wavespeed / fc;blindspd = dop2speed(脉冲重复频率,波长)/ 2;%赔偿一半往返tgtpos = [[1600 0 1300], [2900 0 800]];tgtvel = [[100 80 0], [-blindspd 0 0]];tgtmotion = phased.Platform (“InitialPosition”tgtpos,“速度”,tgtvel);tgtrcs = 25 [25];目标= phased.RadarTarget (“MeanRCS”tgtrcs,“OperatingFrequency”、fc);
杂乱
杂波信号是使用最简单的杂波模型,生成常数γ模型,和γ的值设置为-20分贝。这样一个伽马值是典型的平原杂乱。假设杂乱补丁存在范围,和每个补丁的方位宽度为10度。还假设雷达的主光束点水平。注意,该雷达不动。
trgamma = surfacegamma (“平原”);混乱= constantGammaClutter (“传感器”、天线、…“PropagationSpeed”radiator.PropagationSpeed,…“OperatingFrequency”radiator.OperatingFrequency,…“SampleRate”waveform.SampleRate,“TransmitSignalInputPort”,真的,…脉冲重复频率的waveform.PRF,“伽马”trgamma,“PlatformHeight”sensorheight,…“PlatformSpeed”0,“PlatformDirection”(0,0),…“MountingAngles”(0 0 0),“ClutterMaxRange”,5000,…“ClutterAzimuthSpan”,360,“PatchAzimuthSpan”10…“SeedSource”,“属性”,“种子”,2011);
模拟接收到的脉冲和匹配滤波器
模拟10收到前面定义的脉冲雷达和目标。
pulsenum = 10;%的种子设置接收机重复结果接收器。SeedSource =“属性”;接收器。种子= 2010;rxPulse = helperMTISimulate(波形,发射机,接收机,…散热器、收藏家、sensormotion…目标,tgtmotion,杂乱,pulsenum);
然后将接收到的信号通过一个匹配滤波器。
matchingcoeff = getMatchedFilter(波形);matchedfilter = phased.MatchedFilter (“系数”,matchingcoeff);mfiltOut = matchedfilter (rxPulse);matchingdelay =大小(matchingcoeff, 1) 1;mfiltOut =缓冲区(mfiltOut (matchingdelay + 1:结束),大小(mfiltOut, 1));
执行MTI处理使用Three-Pulse消除器
MTI处理使用MTI滤波器来去除低频组件在标准时间序列。因为土地杂乱通常不动,消除低频分量可以有效地抑制它。的three-pulse消除器是一种流行的和简单的MTI滤波器。消除器是一个零冷杉滤波器和滤波器系数(1 2 1)。
h = (1 2 1);mfiltOut mtiseq =过滤器(h, 1日,[],2);
使用非相干脉冲集成结合缓慢的时间序列。排除前两个脉冲,因为他们是MTI滤波器的过渡时期。
mtiseq = pulsint (mtiseq(:, 3:结束));%进行比较,还整合匹配滤波器的输出mfiltOut = pulsint (mfiltOut(:, 3:结束));
%计算每个快时间样本的范围fast_time_grid =(0:尺寸(mfiltOut, 1) 1) / fs;rangeidx = wavespeed * fast_time_grid / 2;%的阴谋再次接收到的脉冲能量范围情节(rangeidx pow2db (mfiltOut。^ 2),“r——”,…rangeidx pow2db (mtiseq。^ 2),“b -”);网格在;标题(“快使用统一的编码脉冲时间序列”);包含(的范围(m));ylabel (“权力(dB)”);传奇(在MTI滤波器的,MTI滤波器后的);
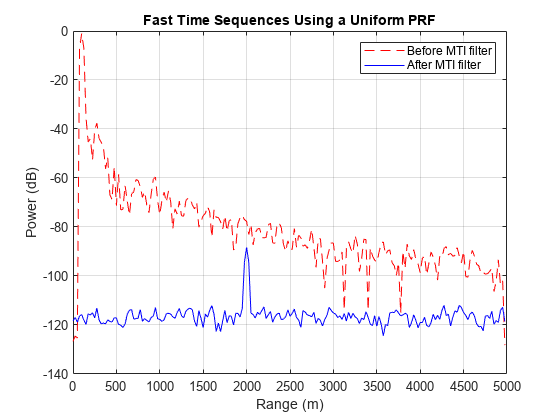
回想一下,有两个目标(在2公里,3公里)。MTI滤波之前,目标都是埋在杂乱的回报。高峰在100下面的从地面直接路径返回正确的雷达。注意,权力是减少随着距离的增加,这是由于信号传输损耗。
MTI滤波后,大多数被删除杂乱除了高峰的直接路径。噪声地板现在不再范围的函数,所以现在接收机噪声而不是杂波噪声。这一变化显示了three-pulse消除器的杂波抑制能力。2公里范围内,你可以看到一个峰值代表了第一个目标。然而,并没有达到3公里范围代表第二个目标。峰消失,因为three-pulse消除器抑制第二个目标,以盲人消除器的速度。
为了更好地理解盲速问题,看的频率响应three-pulse消除器。
f = linspace(0,脉冲重复频率* 9,1000);hresp = freqz (h 1 f,脉冲重复频率);情节(f / 1000, 20 * log10 (abs (hresp)));网格在;包含(的多普勒频率(赫兹));ylabel (“(dB)级”);标题(的频率响应Three-Pulse消除器”);
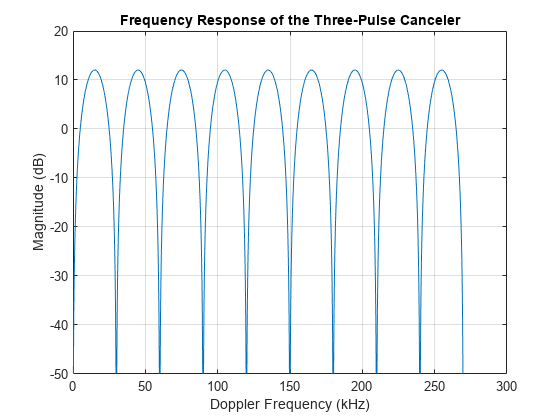
注意经常性null的频率响应。瞎子的null对应于多普勒频率的速度。与这些目标多普勒频率由three-pulse取消消除器。情节表明null发生在脉冲重复频率的整数倍(约30千赫,60 khz,等等)。如果可以删除这些null或推离雷达的多普勒频率区域规范,盲速问题是可以避免的。
模拟了使用交错脉冲重复频率脉冲
的盲速问题的一种解决方案是使用非均匀脉冲重复频率(交错脉冲重复频率)。在不同的脉冲重复频率相邻脉冲传输。这样的配置将下界盲目的速度更高的价值。为了说明这个观点,这个示例使用two-staggered编码脉冲,然后情节的频率响应three-pulse消除器。
选择第二个脉冲重复频率约为25 khz,对应于一个最大明确6公里的范围。
脉冲重复频率= wavespeed。/ (2 * (6000 5000));%计算的频率响应级three-pulse消除器pf1 = @ (f) (1 - 2 * exp (1 j * 2 *π/脉冲重复频率(1)* f) + exp (1 j * 2 *π* 2 /脉冲重复频率(1)* f));pf2 = @ (f) (1 - 2 * exp (1 j * 2 *π/脉冲重复频率(2)* f) + exp (1 j * 2 *π* 2 /脉冲重复频率(2)* f));sfq = (abs (pf1 (f))。^ 2 + abs (pf2 (f)) ^ 2) / 2;%画出频率响应持有在;情节(f / 1000, pow2db (sfq),“r——”);ylim ([-50, 30]);传奇(统一的编码脉冲的,“Two-Staggered脉冲重复频率的);
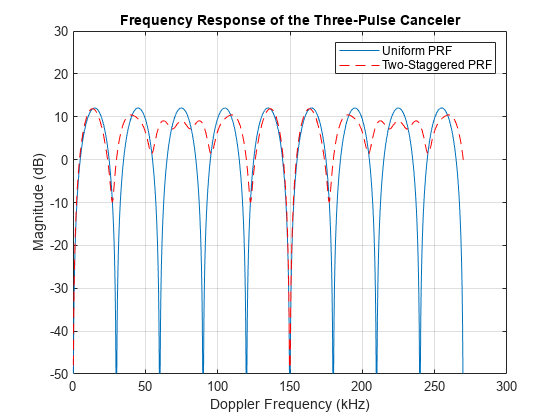
从交错脉冲重复频率的情节你可以看到第一个盲速对应于一个多普勒频率的150 kHz,五倍uniform-PRF情况。因此30千赫的目标多普勒频率不会被抑制。
现在,模拟反映使用交错编码脉冲信号的目标。
%分配新的脉冲重复频率释放(波形);波形。脉冲重复频率=脉冲重复频率;释放(杂乱);杂乱。脉冲重复频率=脉冲重复频率;%复位噪声的种子释放(接收器);接收器。种子= 2010;%重置平台位置重置(sensormotion);重置(tgtmotion);%模拟目标回报rxPulse = helperMTISimulate(波形,发射机,接收机,…散热器、收藏家、sensormotion…目标,tgtmotion,杂乱,pulsenum);
执行MTI处理交错脉冲重复频率
过程的脉冲之前,首先他们穿过一个匹配滤波器,然后整合脉冲不相干的。
mfiltOut = matchedfilter (rxPulse);%使用相同的three-pulse消除器来抑制杂波。mfiltOut mtiseq =过滤器(h, 1日,[],2);%不相干的集成mtiseq = pulsint (mtiseq(:, 3:结束));mfiltOut = pulsint (mfiltOut(:, 3:结束));%计算每个快时间样本的范围fast_time_grid =(0:尺寸(mfiltOut, 1) 1) / fs;rangeidx = wavespeed * fast_time_grid / 2;%绘制快时间序列与范围。clf;情节(rangeidx pow2db (mfiltOut。^ 2),“r——”,…rangeidx pow2db (mtiseq。^ 2),“b -”);网格在;标题(“快时间序列使用交错脉冲重复频率”);包含(的范围(m));ylabel (“权力(dB)”);传奇(在MTI滤波器的,MTI滤波器后的);

情节现在MTI滤波后可检测,显示了目标和杂波也删除。
总结
用非常简单的操作,MTI处理可以有效地抑制低速杂乱。uniform-PRF波形将错过目标盲目的速度,但使用交错脉冲重复频率可以解决此问题。混乱,有一个很大的多普勒带宽,MTI性能可能是可怜的。这样的混乱可以抑制使用时空自适应处理。更多细节,请参见示例介绍自适应时空处理。
引用
理查兹[1],m·A。雷达信号处理的基础。纽约:麦格劳-希尔,2005年。