使用树莓派检测视频中的物体边界
这个例子向您展示了如何在树莓派硬件上使用MATLAB®功能块和Simulink®支持包来识别实时视频流中的对象边界。金宝app金宝app识别物体边界的过程称为边缘检测.本例实现了Sobel边缘检测算法来识别目标的边界。
在这个例子中,你将学习如何:
从网络摄像头或连接树莓派硬件的摄像头模块获取实时视频流。
利用MATLAB函数块对采集的视频实现Sobel边缘检测算法。
在树莓派硬件上显示边缘突出的对象。

所需的产品下载188bet金宝搏
虚拟网络计算(VNC)查看器(可选)
所需的硬件
步骤1:连接树莓派硬件
提示:在开始这个示例之前,我们建议您完成入门Simulink支持包的树莓派硬件金宝app金宝app的例子。
1.将USB数据线的micro-USB端连接树莓派,USB数据线的普通USB端连接计算机。等待硬件上PWR指示灯开始闪烁。
2.要将视频设备连接到硬件,请执行以下操作:
如果你有摄像头,将摄像头连接到硬件上的USB端口。请注意,一些网络摄像头耗电太多,可能需要一个有电源的USB集线器才能正常运行。
如果安装了树莓派摄像机模块,请使用CSI线缆将摄像机模块与硬件连接。摄像机模块与硬件的连接方法请参考厂商提供的操作手册。
3.使用硬件设置界面,配置树莓派网络。

步骤2:打开并配置Simulink边缘检测模型金宝app
打开边缘检测模型。
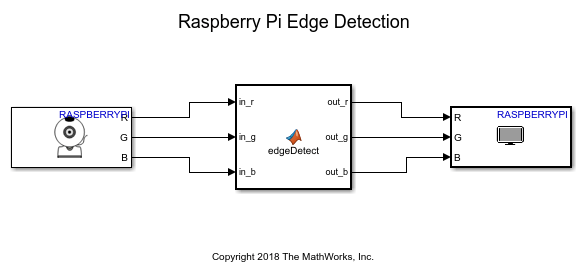
该模型由以下三个模块组成:
V4L2视频捕捉:此块从连接到硬件的视频设备捕获实时图像。该块输出图像像素的红色、绿色和蓝色组件作为一个8位值。
中双击该块并指定要捕获视频的设备名称设备名称参数。如果您不知道设备的名称:
1.打开硬件终端,使用ls命令。这个命令列出了所有连接到硬件的视频设备:
ls |过程/dev/video*
2.复制您的设备名称,并将名称粘贴到设备名称参数。
MATLAB函数:该块实现了Sobel边缘检测算法。该算法通过近似图像的梯度大小来寻找图像中的边缘。双击该块时,可以看到该算法由两个二维过滤器组成,一个用于计算列方向上的梯度,另一个用于计算行方向上的梯度。两个过滤器都使用3 × 3内核。
SDL视频显示:此块显示硬件上边缘突出的对象。
步骤3:更改模型配置参数设置
1.要打开模型配置参数对话框,单击Simulink模型工具栏上的齿轮图标。金宝app
2.在“配置参数”对话框中,选择硬件实现.
3.设置硬件板参数覆盆子π.属性中的参数将自动填充硬件板设置默认值为树莓派。
4.在硬件板设置窗格中,展开目标硬件资源并选择板参数.指定这些参数值:
设备地址:硬件的IP地址或主机名。
用户名:指定硬件上运行的Linux系统的root用户名。缺省用户名为“Raspbian”
π.
密码:指定硬件上Linux系统的root密码。Raspbian Linux发行版的默认密码为
树莓.
5.点击应用.点击好吧保存更改。
步骤4:在树莓派硬件上部署边缘检测Simulink模型金宝app
在硬件选项卡中的金宝app模式部分中,选择机上运行然后点击构建、部署和启动.当支持包生成代码时,模型窗口的左下角显示状态。金宝app成功生成代码后,支持包将在硬件上加载并运行代码。金宝app可执行文件开始从视频设备获取实时视频,对获取的图像运行Sobel算法,然后在树莓派屏幕上显示边缘突出的对象。要查看树莓派屏幕,使用VNC查看器并在硬件上执行远程会话来获取显示。你也可以在显示器和硬件之间连接HDMI线。
您也可以在其中运行这个模型外部模式调整模型中的阈值,观察仿真过程中输出特性的变化。在外部模式下,模型在计算机上运行,边缘突出的图像显示在SDL视频显示块。
其他可以尝试的事情
根据您的要求,将边缘检测算法替换为任何其他性能更好的算法。
另请参阅
你也可以从以下列表中选择一个网站: