激光雷达工具箱
lida - verarbeungsen系统,分析和测试

模具激光雷达工具箱™verfügt尤伯杯Algorithmen,Funktionen UND Anwendungen献给Entwurf,分析UND测试DER激光雷达Verarbeitungssysteme。ESkönnenObjekterkennung UND -verfolgung,semantische Segmentierung,Formanpassung,LIDAR-Registrierung UND Hinderniserkennungdurchgeführtwerden。模具激光雷达工具箱unterstützt模具激光雷达,佳美,Kreuzkalibrierung献给工作流,死计算机视觉UND激光雷达-Verarbeitung kombinieren。
ESkönnenbenutzerdefinierte Erkennungs- UND semantische Segmentierungsmodelle温特Verwendung冯Algorithmen献给深度学习和机器学习,魏某PointSeg,PointPillars UND SqueezeSegV2,trainiert werden。模具激光雷达贴标应用unterstützt模具MANUELLE UND halbautomatische Beschriftung冯激光雷达Punktwolken献给DAS培训冯深Learning- UND机器学习,Modellen。麻省理工学院DER工具箱können回到名单Daten冯Velodyne®-LiDARs gestreamt UND冯Velodyne- UND IBEO激光雷达-Sensoren aufgezeichnete回到名单Daten gelesen werden。
激光雷达工具箱是一个有参考价值的工具,它是激光雷达和导航工作流程的参考工具。用C/ c++实现模具代码生成的工具箱-算法,实现了对模具代码、桌面原型和软件的集成。
现在beginnen:
激光雷达 - Semantische Segmentierung
Trainieren,Bewerten UND Bereitstellen冯semantischen Segmentierungsnetzwerken,einschließlichPointSeg UND SqueezeSegV2,奥夫激光雷达回到名单Daten。

Semantische Segmentierung mit SqueezeSegV2。
Objekterkennung LiDAR-Punktwolken汪汪汪
在利达-庞克托尔肯,我的朋友和我的朋友都是犹太人。在这里,学生和学生都是一个很好的抵抗者。
LiDAR-Kennzeichnung
根据本定义算法,可以根据激光雷达标签应用程序和根据激光雷达自动排序算法。

激光雷达贴标签机应用。
激光雷达UND Kamerakalibrierung
SchätzenDER starren Transformationsmatrix zwischen einem激光雷达UND einer佳美麻省理工学院DER Schachbrett-Kalibrierungsmethode。

激光雷达 - 佳美,Integrierung
Fusionieren冯LiDAR- UND Kameradaten的Zum Projizieren冯激光雷达Punkten AUF BILDER,Fusionieren冯Farbinformationen在激光雷达Punktwolken UNDSchätzen冯3D-Begrenzungsrahmen IM激光雷达MIT 2D-Begrenzungsrahmen einer gemeinsam platzierten佳美。

Begrenzungsrahmen-Transformation von Bild- zu lida - punktwolken。
激光雷达,Verarbeitungsalgorithmen
Anwenden冯Funktionen UND Algorithmen献给下采样,Medianfilterung,Normalschätzung,转型冯Punktwolken UND Extrahieren冯Punktwolkenmerkmalen。

Schatzen von Normwerten fur LiDAR-Punktwolken
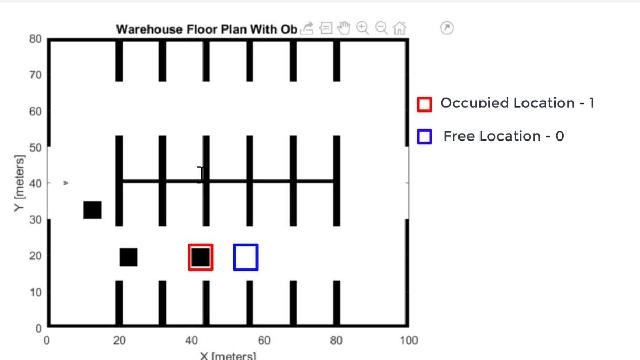
2 d-lidar-slam
Implementieren冯Algorithmen祖尔simultanen Lokalisierung UND Kartierung(SLAM)AUS 2D-激光雷达扫描。Schätzen冯Positionen UND ERSTELLEN冯binären奥德wahrscheinlichkeitstheoretischen Belegungsgittern MIT浙江丽人奥德simulierten Sensormesswerten。
Erfassen冯Velodyne-LiDAR-Sensoren
Erfassen冯活激光雷达Punktwolken冯Velodyne激光雷达-Sensoren,德仁Visualisierung在MATLAB与发展协会冯激光雷达Sensoranwendungen。

第一储蓄Schritte麻省理工学院DER激光雷达Erfassung在MATLAB。
我们是lida - punktwolkendaten
在我们的世界里,我们的世界是一样的,一样的。在厚度和PCD-Dateien上施莱本。

Lesen冯激光雷达Punktwolkendaten IM LAS-格式。
Merkmalsextraktion AUS激光雷达Punktwolken
从lida - punktwolken来的。

Extrahieren UND Anpassen冯Merkmalen AUS激光雷达Punktwolken。
LiDAR-Punktwolkenregistrierung:
3d算法的实现者在博登和Luft-LiDAR-Daten的LiDAR-Punktwolkensequenzen。

卡滕纳从中国来。
