计算机视觉的工具箱
Diseñoyisimulaciónde sistemas de procesamientodevídeo,Visión人造YVisión3D

电脑视觉系统工具箱™Proporciona Algoritmos,Funciones Y应用程序Para ElDiseñoYLaRealizacióndePruebasde Sistemas de ProcesamientodeVídeo,Visión人工YVisión3D。ES Posible Llevar A Cabo LaDetecciónyElSeguimientode Objetos,AsíCogaLaetección,ExtracciónyCoincidenciadeCaracterísticas。en el caso de laVisión3d,La Toolbox Soporta LaCalibrióndeCámarasSimples,EstéreónEjode Pez,LaVisiónnEseréreo,LaReconstucción3D Y El Procesamiento de Nubes de Puntos Lidar Y 3D。LAS Apps DeVisión人工自动自动机制Los Flujos de Trabajo de Everiquetado deValidación(地面真理)Y deCalibracióndeCámaras。
存在的可能性,de entrenar检测对象个性化的中值算法深度学习,机器学习como YOLO v2,更快的R-CNN和ACF。Para la segmentación semántica, se pueden usar algorithm de deep learning como SegNet, U-Net和DeepLab。我们的朋友和朋友都可以探测车子,也可以探测其他的东西。
Puede Acelerar Los Algoritmos Mediante SuEjecuciónCucesadoresMultinúcleoY GPU。LaMayoríadeLosAlgoritmos de Esta Toolbox Soportan LaWeneracióndeCódigoC/ C ++ Para SuOttentaciónConEl Protipado de Escritorio y El Desarrolo de Sistemas deVisiónembebidos。
旅行:

Detecciónyreconcimiento de Objetos
Marcos para entrenar, evaluation e implementdetectode objetos como YOLO v2, Faster R-CNN, ACF y Viola-Jones。这里是反对的和解空间están OCR和视觉上的bolsa。你会发现你的车,你会发现你的车。


Detección de objetos mediante Faster R-CNN。
Segmentación semántica
Semmenteimágenesyvorúmenes3d mediante laclasificacióndepíxelesyvóxelesysymianteredes como segnet,fcn,u-net y deeplab v3 +。

Etiquetado de validación(地面真相)
自动el礼仪para detección de objetos, segmentación semántica y clasificación de escenas mediante las apps Video Labeler e Image Labeler。
 con la app Video Labeler.")
Etiquetado de validación(地面真相)con la app视频标签。
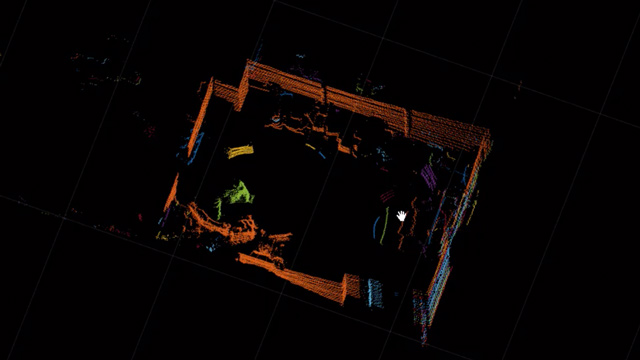
E/S puntos核电站和激光雷达
好了,给我看一份档案,激光雷达传感器RGB-D。
Regantme Nubes de Puntos
注册nubes de puntos 3D mediante los algoritmos NDT (transformada de distribuciones normales), ICP (punto más cercano iterativo) y CPD (movimiento de puntos coherente)。

缝纫的注册店。
Segmentación调整形式
细分Nubes de Puntos en Clusters Y Ajuste Las FormasGeométricas是一个Nubes de Puntos。Segmente El Plano de Tierra de Los Datos de Lidar Para Aplicaciones deConducciónAutónomayRobótica。

Segmentación de una nube de puntos激光雷达。
Calibración de una cámara简单
自动的detección del tabero de ajedrez y calibre las cámaras estenopeica y ojo de pez mediante la app Camera Calibrator。
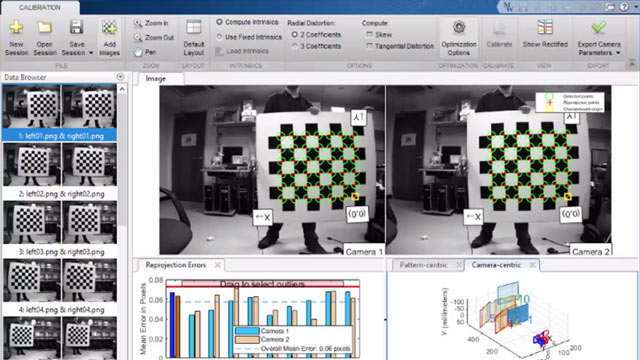
卡里布拉西翁·德卡马拉斯·埃斯特雷奥
Caliber联合国PardeCámarasEstéreo帕拉格计算La Profundidady y Recomstruir Escenas 3D。

应用立体声相机校准器。
视觉三维
这是一种视觉上的运动和运动的一部分。

结构多为运动的一部分。
埃斯特雷奥之旅
计算深度和重建一个场景,3D中位数,参照cámaras estéreo。

不平等性代表的是深奥的亲戚。
检测、外检和鉴定
在不同的基因中检测、排除和消除内部群体、博尔德和埃斯奎纳的特征。

Deteccióndeunobetoen en una escena desordenada atravésde ladetección,Extraviónycecindenciadecaracterísticasmediante puntos。
Registro de imágenes basado en características
基因变异中的突变性状与基因遗传转化相关。

全景图,在características上的注册中心。
奥布杰托斯酒店
我们要把所有的东西都放在我们的托盘里,放在vídeo上。

Las Estelas indican las trayectorias de los objetos seguidos。
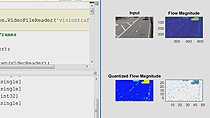
弗雷德尔movimiento
流动性中间区的移动计算,符合bloques和plantillas的要求。

Deteccióndeobjetosen Movimiento Con UnaCámaraFija。
Generacion de脏污
Genere C / C ++,CódigoCUDA Y FUECIONES MEX PARA FUECIONES,CLACE,SYSTEM OFOCONET Y BLOQUES DE TOOLBOX。

视频贴标机e图像贴标机
皮克斯的复印机和复印机;panorámica和zoom mejorados;navegación por cuadros mejorada;图像标签机的ROI de líneas、atributos de etiquetas和adición subetiquetas。
奥门托德达托斯就能探测到目标
伊马基尼和卡德罗斯所崇拜的变革。
Segmentación semántica
Clasificacióndepíxeles个体enimágenesyvorúmenes3d mediante deebplab v3 + y redes 3d U-net。
Detección de objetos para深度学习
entrenamiento de R-CNN de extremo a extremo más rápido, estimación de cuadros de anclaje y uso de datos de imagen multicanal。
Aceleraciónde深度学习
optimización de YOLO v2 y segmentación semántica mediante aceleración MEX。
Consulte拉斯维加斯Notas de la versiónPara Obener Detalles Sobre estascaracterísticasy las funciones eadenderes。
