无人机的工具箱
Diseñe,我们可以用VANT
无人机工具箱比例的herramientas应用程序参照diseñar,类似的,可能的应用程序vehículos aéreos没有tripulados (VANT)无人机。Puede diseñar algoritmos de vuelo autónomo,想要控制vuelo。应用程序飞行日志分析仪可以进行交互式的三维分析,información de telemetría我们的讲座可以感知部分的记录格式。
Para la simulación en escritorio y as pruebas hardware-in- loop (HIL) de vuelo autónomo y controladores de vuelo, puede general相似的场景de VANT。在cámara, LiDAR, IMU和GPS的传感器上可能的类似,在simulación 2.5D的3D fotorrealista上可能的类似。
无人机工具箱比例适用于在VANT中使用的频率,故事como中端无人机autónomos con VANT多旋翼。Esta toolbox soporta la generación de código C/ c++ para el prototipado rápido, las pruebas HIL despliegue独立的硬件,como por ejemplo el piloto automático Pixhawk®(反对嵌入式编码器®).
Comience:

Simulación关于感官讲座的中间部分。
Simulación de VANT立方体
在GPS, INS和激光雷达传感器的模拟实验中,我们使用算法对立方体进行模拟。

Simulación在个性化的立方体场景中。
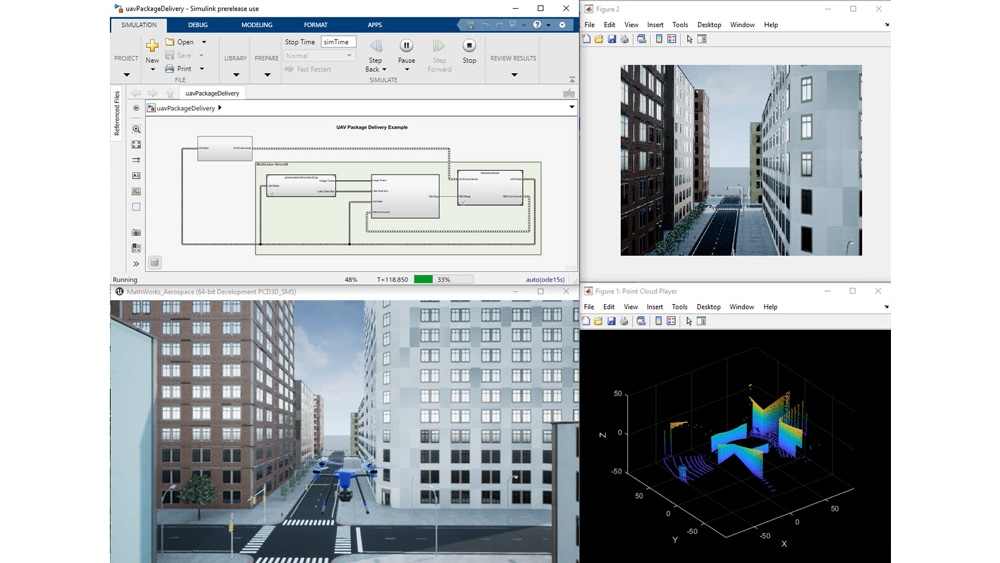
Simulación de VANT con虚幻引擎
Desarrolle, pruebe y visualalgoritmos de vuelo autónomo de VANT en entorno simulación 3D generado中级虚幻引擎®de史诗般的游戏®我们的传感器属cámara和激光雷达属。

Simulación de scenas, vehículos y senorno 3D generado por虚幻引擎。
App Flight Log Analyzer
import archivos de registro en format de archivoo TLOG, ULOG y personalizados, y después visualice y analice interactivamente los datos importados con gráficas personalizables。

Análisis interactivo de datos de telemetría con la app Flight Log Analyzer。
Visualizacion y reproduccion
Utilice gráficas预先定义个性化,并在telemetría的注册表中添加可视化数据。

Gráfica generada部分记录,telemetría。

Representación我们的多旋翼飞机有一个模型,它可以和导引模型一起简化。
计划de VANT
Planifique y simmiones de VANT autónomos utilizdo algoritmos de seguimiento de waypoints, seguimiento de órbitas y planificación de trayectorias个性化。

Diseño y simulación我们的航路点管制员。
Conectividad mediante MAVLink
根据客户的实际情况,通过微型飞行器链路(MAVLink)的通信协议,将硬件与设备连接起来。

协议MAVLink与硬件的通信连接在parámetros的VANT上。
Pilotos automaticos PX4
Acceda a periféricos de pilotos automáticos Pixhawk durante simulación en平台硬件主机PX4®反对厄尔安装“无人机工具箱”automáticos PX4.使用嵌入式编码器,您可以使用automáticos Pixhawk的控制算法。

Diseño de algoritmos de control de vuelo y despliegue en pilotos automáticos Pixhawk。
