自动化驾驶工具箱
Concevez,模拟和测试systèmes ADAS和传导自治
自动化驾驶工具箱™建议Des algorithmes et des extils poul la Conception et lesystèmesadaset de conduite autonome。Cette Toolbox Vous Permet de Concevoir et de Testers desSystèmesdeperceptionVisuelle et Lidar,Mais Aussi de Fusion de Capteurs,De Plantificate de Trajections et deContrôledesVéhicules。Parmi Les Persils De Vission化,鸟瞰图Teave-View et Autres Afficheurs Pin La Couverture des Capteurs,LesDétectionsetLESTERAIRES,AINSI Que des Les Trajectors Pour LesDonnéesvidéo,Lidar et Cartographices。La Toolbox Permet Aussi D'Importer et d'Utiliser desDonnéesHIN HD Live Map etdesRéseaux路由器开放式®。
Grâce à应用地面真相标记器,你们可以自动标记données de la vérité-terrain pour entraîner et évaluer des算法的感知。为了测试硬件在环(HIL)和模拟的基础上的融合,感知,平面化的轨迹和logique contrôle,你可以看到générer和模拟器的scénarios导管。你们可以使用également模拟器données de caméra,雷达和激光雷达在一个三维环境中photoréaliste以及détections捕获物体和循环在一个模拟环境中2.5-D。
自动驾驶工具箱理解référence的应用示例fonctionnalités ADAS和引导式自动驾驶répandues,说明système的正面防撞警报(FCW), système的辅助程序(AEB),雷达régulation的距离(ACC),对LKA和système的自动机的授权的警报。工具箱允许générer的代码C/ c++原型快速和测试HIL,并支持的算法,融合,跟踪,平面化,轨迹和contrôle du véhicule。金宝app
在知道加上:


Livre Blanc.
Fusion de Capteurs et跟踪倒入lessystèmes自动研究

Détecter les véhicules和在référence的应用中循环的voies de circulation pour système de perception。
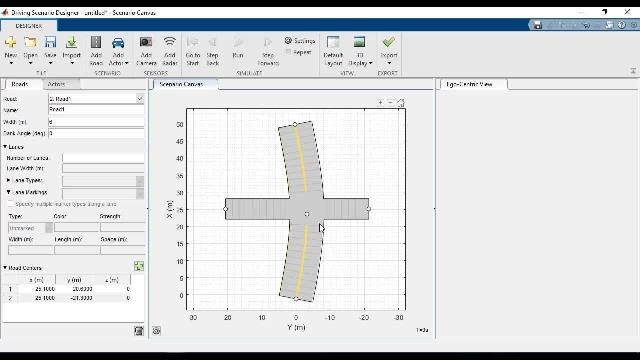
导管模拟cuboïde
Générezdesdédiencessynthétiquesdepuis lesmodèlesde capteurs radar et decaméra,et incorporez cesdétencesdans desscénariosde conduite pour tester les algorithmes de conduite autonome avec联合国us simulateurcuboïde。Desréseaux路由器,Des Acteurs et des Capteurs Avec L'Application Drive Scenario Designer。Importz des Tests Euro Ncap etdesRéseaux路由器OpendrivePrédéfinis。
模拟scénarios de导管avec虚幻引擎
Développez, testez et visualisez les表现的算法,在一种环境中执行simulé 3D avec虚幻引擎®d 'Epic游戏®。

利用三维模拟环境注册données de capteur synthétiques, développer un système de détection de mareur de voies,等测试者système dans différents scénarios。
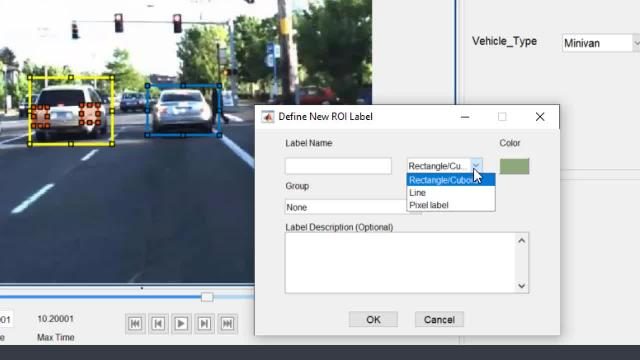
自动化de la Labellisation desdonnéesdelavérité-tellain
Utilisesz L'Application Right Laber La Labellisation Automatique et Interaction desDonnéesdeLavérité-terrain倒入La Dtrection d'Objets,LaSegmentationSémantique等Scènes。
测试d'almorimes de感知
ÉvaluezLA表演Des algcorithmes de Perception en比较LesDonnéesdeLavérité-Terrain Aux Sorties Des算法。

ÉvaluerLESDétectionssdesImpesde Voies de Circulation Vis-is desdonnéesdeavérité-tellain。
Conception desystèmesde Vision
DECOCKPEZ DES ALGORIOMES DE COMPUTER VISION POUR LADÉTECEDEVÉHICULESet dePiétons,LADétentiondesvoies de Circulation等。

模拟D'联合国Capteur deCaméramonoculaire。
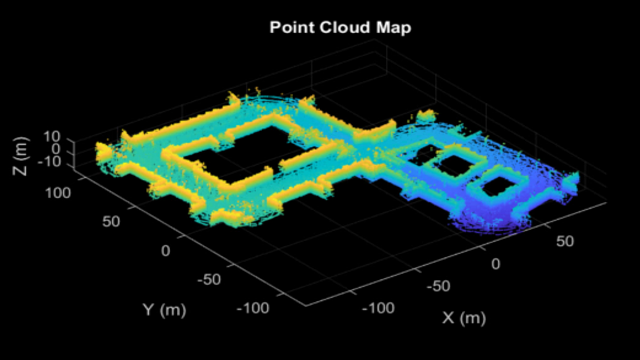
追踪潮流赛
UtiliteSz LesDonnéeslidarppledétecterdes障碍ET分段器Les计划De Sol。

AccèsAuxDonnées在这里HD Live地图
Lisez les données de carte issues du service HERE HD Live Map, y include les cartes sous forme de tuiles of the continent des informations détaillées sur les routes, les voies and la本地化信息。

Utheriser desDonnéesHD Live Map PourVérifierLa配置Des voies。
可视化do donnes de carte
利用coordonnées的流量为véhicules在流通中的位置的制图。

données制图学的流量Affichage

Plantified Et可视化De Trajectoires de Conduite Dans联合国环境3D

Contrôleurlatéral斯坦利倒计计算器les角度de方向。