ROS工具箱
Concevez, simulez et déployez des applications basées sur ROS
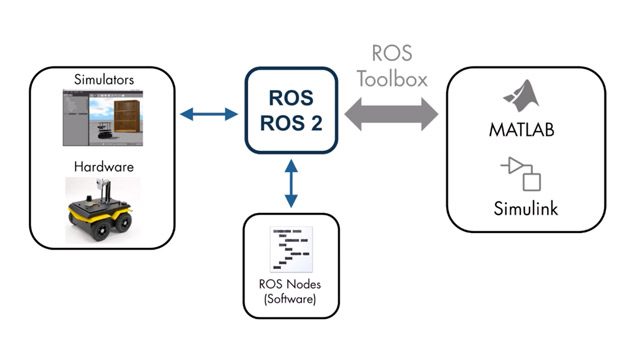
ROS工具箱有一个连接MATLAB的接口®等仿真金宝app软件®AU机器人操作系统(ROS et ROS 2),VOUS渗透物AINSI DECRÉER联合国Réseaudenudsros。Cette Toolbox Tentut des Fontions Matlab et des Blocs S金宝appimulink Pour L'进口,L'Analyze et La讲座DesDonnéesROSeNregistréesdansdes Fichiers Rosbag。Vous Pouvez enoutétabliruneconnexionàunRéseauROSLive Afin D'AccéderAux消息ROS。
工具箱中你们可以看到vérifier les nœuds ROS通过PC上的模拟和établissant一个连接à机器人外部的模拟对象告诉我们的是露台。ROS工具箱支持la g金宝appénération de code c++ (avecMATLAB编码器™等金宝appSimulink Coder™),CE Qui Vous权限DeGénérer自动申请desnœudsrosàpartir d'unmodèlesimulink et dededéployersur金宝app de HardwareSimuléou体格。Le 金宝appSupport Du Mode外部外部De De De金宝app Simulink Vous权限D'Former Message et de Modifier LesParamètres吊坠L'Exécutiondumodèlesurle硬件。
在知道加上:
Connexion AuRéseauROS
请连接à des réseaux ROS或ROS 2等。利用l'introspection pour répertorier les topics et types disponbles。有一个结构détaillée des messages ROS。

连接à un réseau ROS。
配置réseau ROS
Créez et définissez votre propre réseau ROS ou ROS 2 pour établir la通信中心différents服装。Configurez plusieurs nœuds pour la分布des tâches等信息。

例如réseau ROS 2。
出版商等用户
特使和收到ROS 2的信息à我将使用sémantiquespublish-subscribe作为一个主题的辅助。

Modèle为金宝appdonnées的捕获和roues的出版而进行的模拟。
服务等行为
使用一个客户-服务架构为requêtes的特使,exécuter的tâches以及应用程序的信息的更新。

互动客户端 - 服务àl'anide de Services et行动ROS。
Serveur德产品
Utilisez les servers de paramètres ROS pour stocker de options de configuration associées à plusieurs nœuds et pourreconfigure dynamiquement nœuds。

ModèleI金宝appmulinkQui Interroge etdéfinitdesparamètresrospleplecontrôledes destages de Viteses d'联合国véhicule。
日志文件(rosbags)
进口过滤器,显像仪和分析仪données enregistrées。

Processus deSélectiondedonnéesros dans des fichiers rosbag。
中国的消息
Utilisez une bibliothèque de packages de messages ROS 金宝appsupportés pour vos applications ROS。

消息示例ROS supportés。金宝app
消息personnalises
新Ajoutez de nouveaux为应用程序类型的消息ROS ou ROS 2 grâce au支持消息personnalisés。金宝app

Génération de messages ROS 2 personnalisés。
GénérationDeNœud.
Générez du code c++ pour des applications autonomous utilisant la fonctionnalité ROS ou ROS 2。

Générer un noeud ROS 2 standalone depuis 金宝appSimulink(6张图片)

Modèlei金宝appmulinkpplelecontróled'联合国机器人exécutésur联合国simulateur兼容的ROS。
