传感器融合和跟踪工具箱
Concevoir,Simuler Et Tester LesSystèmes多克雷斯德·埃德航行
传感器融合和跟踪Toolbox™offre des algorithmes et des sutils pour la Conception,La Simulation et Le Test deSystèmesfusionnant lesDonnéesrese de倍数capeurs puer Le Mantien de la Loce et de la Carecience Stemination et de la Countcience funnlle les LemplesdeRéférencefournissent un point dedépartPOUL LA MISE EN OEUVRE DE COMPORANTS DE PISTAGE MULTI-OBJETS et deDONNÉES发布DE CURLDIPLES CAPTEURS,Utiles DesSystèmesAutoneset de SurveillanceAéroportés,地带,Nanvals,Navals et Sous-Marins。
您可以使用données réelles的来源多种多样:雷达活动或被动,声纳,激光雷达,EO/IR, IMU和GPS。你们可以在également générer des données synthétiques à的基础上通过différents scénarios的算法进行测试。Cette工具箱理解跟踪器多对象和滤波器估计évaluer les architectures combined le niveau grille, le niveau détection, et la fusion au niveau objet ou pistite。她提议également des métriques, notamment l' aff做作最佳(OSPA)和l' aff做作最佳généralisée (GOSPA),为了使表演更有效的关系à des données de vérité-terrain。
POUL L'AccéliverationDeLaSimulation Ainsi Que Le Prototypage Rapide,La Toolbox Su金宝apppporte LaGénérationDeCodeC.
EN Savoir Plus:


免费白皮书
自治系统传感器融合和跟踪
空间监控aérien
Suivez Placieurs Objets en Exploitant LesDonnéesdeCupteursActifs et Passifs Comme Les Radars,LES Capeurs ADS-B ET EO / IR。Personnalisez Les跟踪器倾吐支持者Des Obj金宝appets en Mouvement。

Pistage desaéronefsavec desscénariosgéocentriques
监视抹菜
Suivez Placieurs Objets Spatiaux Avec desDonnéesdectereurs雷达倒入Générer联合国良心的情况。Vous Pouvez Configurer Les Trackers Put Utiliser UnModèlede MouvementKéplérienou d'autresmodèlesorbiraux。
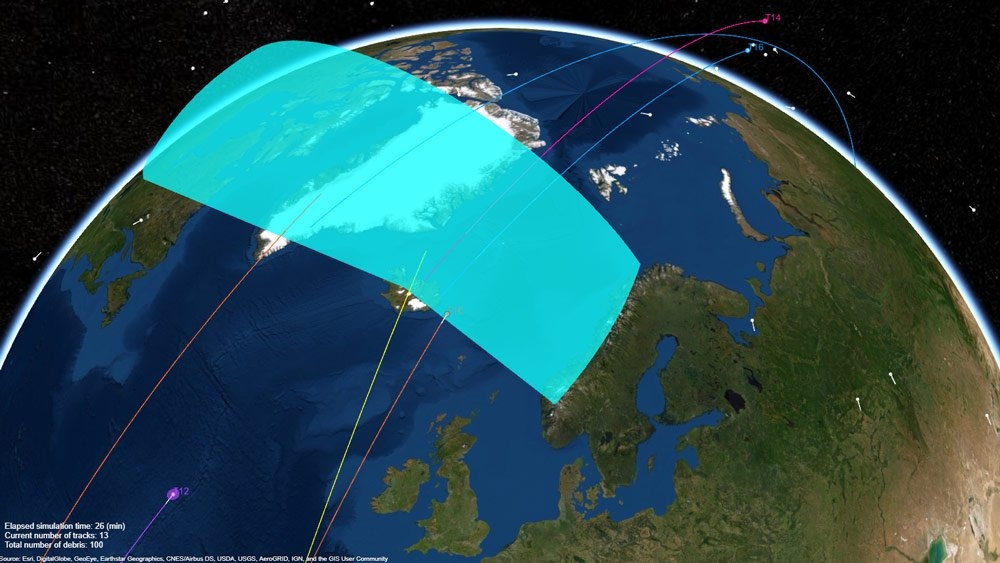
Pistagedeébrisspatiacux avec desmodèlesdemouvementképlérien
监视壁炉
Suivez desObjetsétendussurtre ou sur mer avec des capteurs雷达et lidarhauterésolution。
Pistage par capteur独一无二
Modélisezet simulez des跟踪器Multi-Objets PourRéaliserLeTraitementRequis Dans Des Capteurs Intellentents。Transformez Notamment VosDonnéesBrues en Listes de Pistes亲属àdesbjets。
FusionCentralisée.
Pistez desObjetsétendusavec联合国追踪器中心Qui fusionne desdonnéesde placeurs capteurs dansdifférents模式。Utilisez联合国追踪博士(概率假设密度)倒估计LaCinématiqueDSBejjetsen Mouvement,ENMêmeTempsQue Leurs尺寸Et Leur取向。倒入Les Environnements Urbains Compleases,Mettez en Place联合国追踪器RFS(随机有限套装)BaséSur格栅倒入Per Peter de Chaque Cellule de la Grille Ainsi que sacinématique。
融合Au Niveau Piste
Fusionnez Les Pistes Procenant De Placieurs Sources将Obtenir Une估计Plusfulthètedel'environment。ÉvaluezLES架构De FusionPisteàPisteDansSystèmesAvecStsIntrantes de Bande Passante Ou desSystèmess'AppuyantSur LeContrôlerumeur pourÉcarterLesRésultatsPérimés。
Filtres d'估计et协会dedonnées
estimezlesétatsdes objets avec Unebibliothèquequotantde倍数filtres d'估计,Notamment des Filtres de KalmanLinéaireset非Linéaires,Des Filtres Mult-Modèles等滤器à分子。麻烦La Meilleure ou Les K-Meilleures Solu金宝搏官方网站tions AuxProblèmesd'Moction2DOU S-D。Associez desdétectionsàdsdétectionsàdes destectionsàdespistesàdspistesàsdespistesàdspistesàdespistesàsdepistes。

距离上的相位滤波是非高斯的
跟踪器多副本
Intégrezdes filtres d'估计,des算法d'影响et une logique de gestion de pistes dans des跟踪器多功能者倒入融合器lesdétectionsen pistess。Convertissez LesDonnéesde Vos Capteurs Dans Un Format deDétectionetuilisez联合国追踪器GNN(全球最近邻居)Dans desScénarioSimple。Basculez简介Vers UN跟踪器JPDA(联合概率数据协会),MHT(多假设跟踪器)ou Phd Pour DesScénarios复合体,Par Exemple Le Pistage De CiblesRapprochéesAvecdesAmbiguïtésdeMesures。
跟踪器D'ObjetsÉtendusetBasésSurdes Grilles
Utilitez联合国追踪博士涌入Suivre LaCinématique,La Taille et L'Orientation desObjetsétendus。EN VOUS Appuyant Sur denDonnéesdeCupeursHauteRésolutionyoune les yuage de Points Lidar et Radar,Utilisez des Trackers RFSBaséssur grilles倒估计Lescaractériquesdevicomiques des cellules d'Une Grille D'Une Grille Des Environnements Urbines复合物。
融合Au Niveau Piste
Fusionnez Les PistesGénéréespar les capteurs de pistage ou Autres Objets de FusionPisteàpiste。Concevez desSystèmesdepistagedécentralisésdansdessystèmesàandepastantelimitée。RéduisezLa宣传De RumeurPourécarterLESDonnéesPérimées撰写Des跟踪器。
建筑物融合
Explorez Les架构de跟踪器et recherchez les comperomis de Design entre La FusionPisteàpiste,Le Pistage Au Niveau Central欧莱架构De Pistage杂交。Utilisez La Fusion Statique(Détention)倒入组合器LesDétectionssdes capteurs d'disce ou de utitht tels que les capteurs incaruges,les Esm ou les雷达雷达双峰公司。
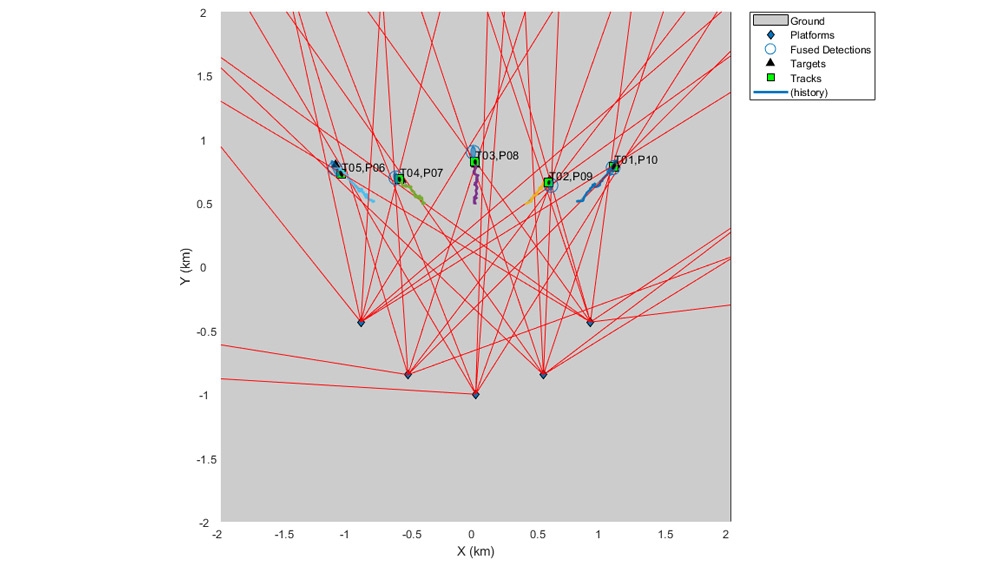
Pistage Avec des Capteurs Passifs SynchronesDistribués
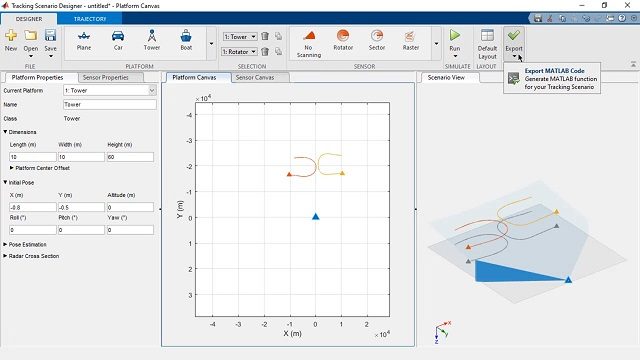
Trajectoire des objetsetgénérationde姿势
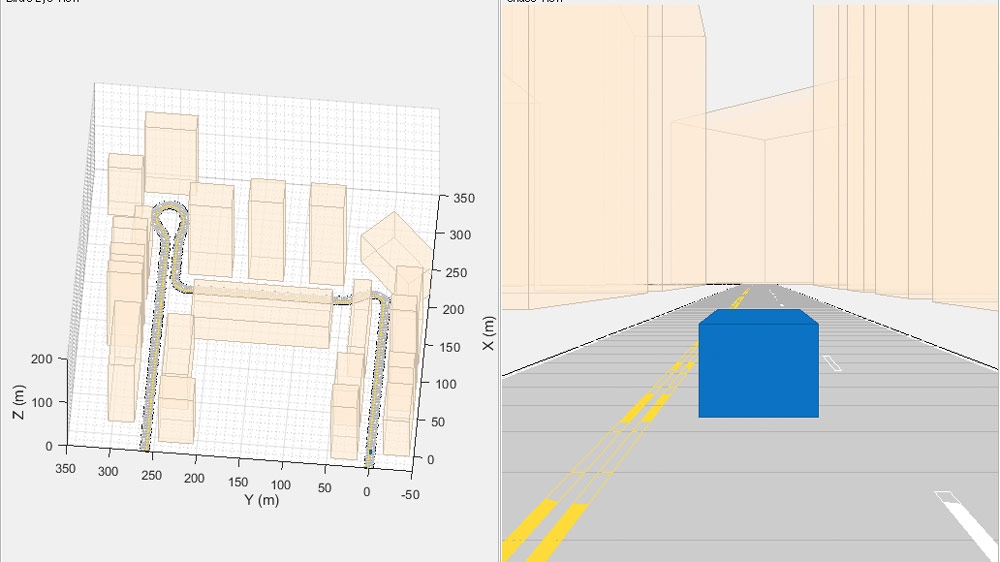
DéfinissezdesScénariosdeManière互动Avec L'Application Tracking场景Designeretgénérezdescriptsentet ofterab quidéfinissentet ofdansent la位置,La Vitesse et l'Orientationréellesdes Objets DansDifférentsRéférenciels。
Modèlesde Capteurs Actifs et Passifs
Modélisez des capteurs actifs (notamment radar, sonar and lidar) pour générer des détections d'objets。balayages的simules mécaniques et électroniques en azimut et/ou en élévation。Modélisez des capteurs RWR(雷达预警接收机),ESM(电子支持措施),声纳passif et arroues p金宝appour générer des détections d 'angle à utiliser dans des scénarios de pistage。Modélisez des systèmes多台雷达和声纳avec émetteurs和捕获。
模拟De Monte-Carlo
Exécutez模拟蒙特卡罗利用différentes价值的bruit aléatoire。在vérité地形上的扰动和结构上的测试的鲁棒性的增强。
本地化倒Le Pistage de Plateformes
Fusionnez LesDonnéesdes Capteurs Imu,GPS et de l'Altimètreppodéterminerl'tioration et la Posity Dans Le Temps et Permettre Le Pistage Avec des Platefore Mobiles。estimez l'tiousation et la位置Dans Le Temps Pour LesSystèmesdevightivearioninertielle(INS)Avec Des algorionalsOptimisésplefliférentes配置De Capteurs,extigences de Sortie et ontrintes de Mouvements。
Modèlesde Centereurs Ins
Modélisez des IMU (unités de memeasure inertielle), des GPS, des altimètres and des INS。Réglez les paramètres environnementaux comme la température and propriétés du bruit des modèles pour simuler des environments réels。
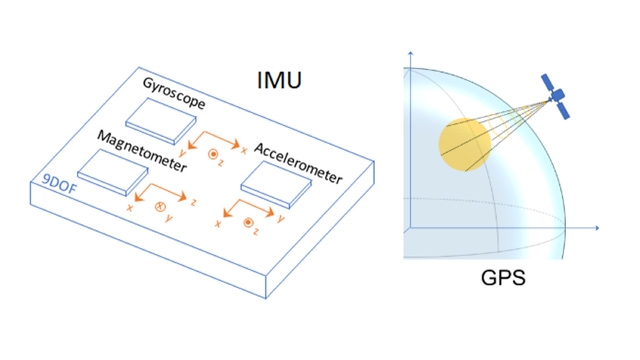
Modéliser des capteurs IMU和GPS pour测试仪的融合惯性算法。
估计de l'定位
Fusionnez Les讲座D'联合国Accéléromètreet d'联合国Magnétomètrepopisimuler联合国Compasélectronique(eNompass)。Fusionnez Les讲座d'联合国Accéléromètre,d'联合国吉尔斯托克et d'联合国Magnétomètreavec联合国Filtre desystèmederéférenced'ditivityet de cap(ahrs)倒估计l'定位。
估计de la姿势
estimez la pose avec et sans ontrattinge de帽non holonome avec des capteurs inertiels et un gps。Déterminezla Pose Sans GPS en Fusionnant des Capteurs Inertiels Avec desAltijètresou UneOdométrieVisuelle。
OdométrieVisuelle-Inertielle Avec Fusion deDonnéesMuuetCaméra
可视化descénarios.
Tracez L'Orientation et La Vitesse des Objets,Les Trajectoires delaVérité地形,Les Mesures de Capteurs et Les Pistes en 3D Tracez Les IncEltitudes deDétectionet de Pistage。VisualeSezz Les Identifiants de Piste Avec Les Traps Itsiquees。
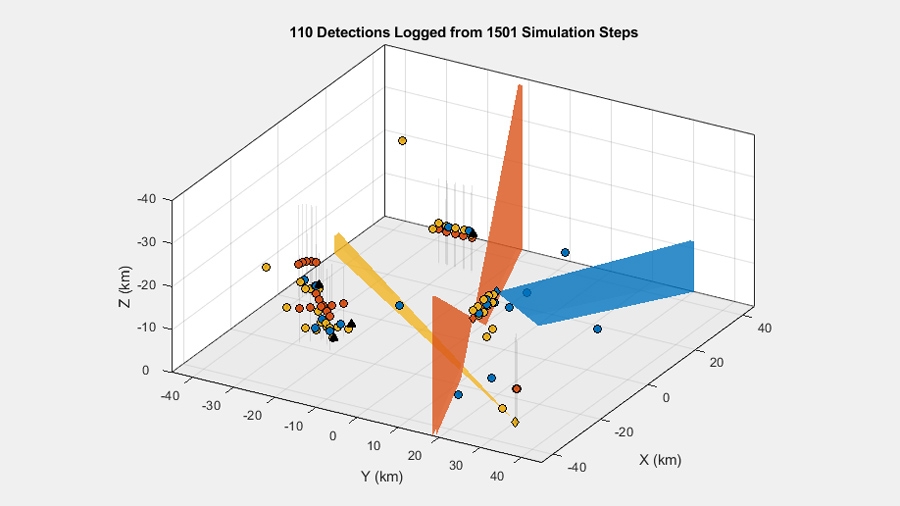
TracéThéâtraLDANSUNSCÉNARIO多板格式
Métriques在滑雪道上
Générez des métriques d'établissement,维持和抑制滑雪道,包括滑雪道的长度,滑雪道的破裂和échanges滑雪道的识别。在位置上的滑雪道précision, vitesse, 'accélération和线性二次误差(RMSE),因为估计的误差normalisée au carré (ANEES)。Utilisez les métriques intégrées OSPA和GOSPA pour résumer les表演在一个首尔的分数。用艾伦的方差分析惯性的捕获。
RégrageDesFiltres等追踪器
Ajustez lesparamètresdes跟踪器多objets comme le seuil d'templation,la Fonction d'初始化des filtres et les seuils de确认等抑制倒入最大化器的性能。ComparezLesRésultatsentre lesdifférents跟踪器et配置de跟踪器。Réglez自动化Les Filtres Ins Pout Operiser LesParamètresde Bruit。
一代德代码
Générezdu Code C / C ++ et Mex PourAccélérerLa Simulation Ou Le Prototypage AvecMatlab编码器™。Appliquez des Seuils de Calcul deCoïtspléduirele tempsconsacréauxcoïtsd'computhation。