概述
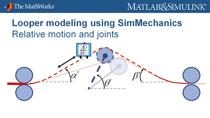
探索如何使用Simscape™multibody™建模和模拟多体动力学。我们向您展示如何使用身体,关节,约束和力来定义多体系统。您将能够模拟系统中的多体动力学,如机器人,车辆悬架,建筑设备和起落架。
包括演示和解释如何:
- 定义用MATLAB®变量参数化的体
- 用接头组装阀体
- 在Simulink®中模拟多体动力学金宝app
- 回顾一个三维动画的仿真结果
多体动力学的仿真从您构建的模型开始。Simscape Multibody使您能够定义可在其他系统中轻松重用的模块化机械组件。用于为模型设置参数的MATLAB变量可以自动调整以满足设计要求,或者在给定范围内进行测试以查看它们对系统性能的影响。将Simscape多体模型与Simscape组件和在Simulink中建模的控制系统相结合,可以在单个仿真环境中模拟和分析整个系统。金宝app