在这个 视频, 我们展示了如何 使用强化学习的领域定向控制 一个 永磁同步电机。
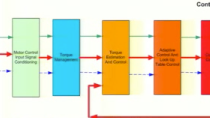
为了展示这一点,我们从一个使用典型的面向领域的控制架构的例子开始,其中外环控制器负责速度控制;而内环 PI 控制器负责控制d轴和q轴电流。
然后我们创建并验证一个 强化学习代理 ,它取代了这个体系结构的内环控制器。
当系统是非线性的时候,RL代理的使用是特别有益的,在这种情况下,我们可以训练一个单一的RL代理,而不是在多个操作条件下整定PI控制器。
在这个例子中,我们使用一个线性电机模型来展示使用强化学习的面向领域控制的工作流,这个工作流对于复杂的非线性电机也是一样的。
让我们看看实现面向字段的控制体系结构金宝app的Simulink模型。
该模型包含两个控制回路:外速度回路和内电流回路。
外环是在“速度控制”子系统中实现的,它包含一个PI控制器,负责为内环产生参考电流。
内环是在“电流控制”子系统中实现的,包含两个PI控制器来确定dq帧中的参考电压。
然后使用参考电压产生适当的PWM信号,控制逆变器的半导体开关,然后驱动永磁同步电机实现所需的转矩和磁通。
让我们继续运行Simulink模型。 金宝app
我们可以看到,控制器的跟踪性能很好,能够跟踪期望的速度。
让我们将这个结果保存起来,以便稍后与强化学习控制器进行比较。
现在我们更新现有的模型,将电流环中的两个PI控制器替换为一个Reinforcement Learning Agent block.
在这个例子中,我们使用DDPG作为强化学习算法,它同时训练一个演员和一个评论家来学习一个最优的策略,使长期回报最大化。
一旦用强化学习块更金宝app新了Simulink模型 ,我们就可以按照强化学习工作流来设置、训练和模拟控制器。
强化学习流程如下:
第一步是创造一个环境。在这个例子中,我们已经有了一个Simulink模型,其中包含了在“工厂金宝app和逆变器”子系统中使用电机控制模块和Simscape电气建模的永磁同步电机。
然后,我们使用这个Simulink金宝app模型创建一个具有适当观察和行动的强化学习环境界面。
这里观察到的强化学习块是错误的定子电流' id错误'和' iq错误'和定子电流' id '和' iq '。
动作是定子电压' vd '和' vq '。
接下来,我们创建奖励信号,让强化学习代理知道它在训练中选择的动作是好是坏,这是基于它与环境的交互作用。
在这里,我们基于二次奖励惩罚(惩罚距离目标和控制努力的距离)来塑造奖励。
然后我们继续创建网络架构。
在这里,我们根据DDPG算法的要求,使用MATLAB函数对层和表示进行编程构造参与者和评论网络。
神经网络也可以使用Deep Network Designer应用程序构建,然后导入MATLAB。
本例中的批评网络以观察和动作作为输入,给出估计的Q值作为输出。
另一方面,行动者网络将观察作为输入,并将行动作为输出。
创建演员和影评人表示后,我们可以创建DDPG代理。
DDPG代理的采样时间根据控制环路的执行要求进行配置。
一般情况下,样本时间越短的agent训练时间越长,因为每一集的模拟步骤越多。
我们现在可以培训代理人了。
首先,我们指定培训选项。
这里我们指定我们希望最多运行2000集的培训,如果平均奖励超过提供的价值就停止培训。
然后我们使用' train '命令开始训练过程。
一般来说,最好的做法是在训练过程中随机参考信号给控制器,以获得更鲁棒的策略。这可以通过为环境编写一个本地重置函数来实现。
在培训过程中,可以在插曲管理器中监控培训进度。
一旦训练完成,我们就可以从训练的代理模拟和验证控制策略。
利用训练agent对模型进行仿真,发现强化学习agent控制定子电流时,磁场定向控制具有良好的速度跟踪性能。
通过查看这一性能与先前保存的输出,我们看到,具有强化学习代理的领域定向控制的性能与它的PI控制器对应部分相当。
视频到此结束。