一个微分方程是如何成为一个机器人
这六个部分网络研讨会系列将研究一个简单的二阶微分方程如何演变成多重度的自由度机器人操纵器包括所述控制,电子,和三维的完整体系力学的复杂的动态模型。该系统使用由MATLAB提供的单一的,集成的开发环境®和Sim金宝appulink®产品系列。
该系列的亮点包括:
- 使用MuPAD运动的创建方程®在符号数学工具箱界面™
- 使用建模Simulink和复杂的机电系统物理模型库金宝app
- 使用SimMechanics直接从CAD软件中导入三维机制™翻译者
- 直接设计,调整和优化控制器使用控制系统工具箱您的Simulink模型金宝app™和优化工具箱™
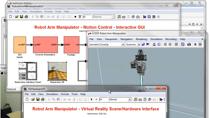
- 原型,并直接与Simulink的实时测试您的实时系统硬件金宝app™

概观在这个研讨会,我们将展示的MathWorks工具套件如何补充和加强对方,他们是如何结合在一起的时候,用户可以释放我们的完整开发环境的全部潜力。

第1部分:刚体动力学建模三维机械系统。制定符号表情和运动方程,并构建可用于数值模拟动态模型。直接从流行的CAD软件包导入机制。

第2部分:执行器和传感器通过第一原理数学模型的不同电气和电子电路,以及从我们先进的物理建模库电器元件。验证直接在Simulink环境下你对测试数据模型。金宝app

第3部分:控制系统设计机电系统的控制器。线性化您的工厂,并自动调整PID收益。优化多个控制器增益和直接整个系统的性能上的非线性仿真模型。

第4部分:正向和反向运动学执行基本运动学分析。把象征性的研究成果转化为Simulink环境。金宝app一般应用优化技术。自动生成报表,并创建独立应用程序。
第5部分:硬件原型自动生成从Simulink模型的C代码和接口实时硬件来执行典型的快速原型任务。金宝app
您还可以选择从下面的列表中的网站: