车身总道路载重gydF4y2Ba
使用滑行测试系数的车辆运动gydF4y2Ba
- 库:gydF4y2Ba
动力总成模块/车辆动力学gydF4y2Ba
车辆动力学模块/车身gydF4y2Ba
描述gydF4y2Ba
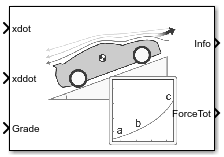
的gydF4y2Ba车身总道路载重gydF4y2Ba块实现了一个一自由度(1DOF)刚性车辆模型使用滑行测试系数。您可以在车辆模型中使用此块来表示传动系统和底盘应用于变速器或发动机的负载。它适用于系统级性能、组件尺寸、燃油经济性或驱动循环跟踪研究。该模块以最小的参数化或计算成本计算动态动力系统负载。gydF4y2Ba
您可以配置块的运动学,力,或总功率输入。gydF4y2Ba
运动学块利用车辆纵向速度和加速度来计算牵引力和功率。gydF4y2Ba
力块利用牵引力计算车辆纵向位移和速度。gydF4y2Ba
动力块利用发动机或传动功率来计算车辆纵向位移和速度。gydF4y2Ba
动力学gydF4y2Ba
为了计算作用在车辆上的总道路载荷,块实现了这个方程。gydF4y2Ba
来确定系数gydF4y2Ba一个gydF4y2Ba,gydF4y2BabgydF4y2Ba,gydF4y2BacgydF4y2Ba,您可以使用类似于中描述的测试过程gydF4y2Ba使用滑行技术的道路负荷测量和测功机模拟gydF4y2Ba.你也可以使用gydF4y2Ba金宝app®gydF4y2Ba优化设计™gydF4y2Ba使系数与实测数据相吻合。gydF4y2Ba
为了计算飞行器的运动,块体采用了刚体的牛顿定律。gydF4y2Ba
总功率输入是总力和纵向速度的乘积。由道路力和重力产生的动力是道路力和纵向速度的乘积。gydF4y2Ba
权力的会计gydF4y2Ba
对于功率核算,块实现了这些方程。gydF4y2Ba
| 总线信号gydF4y2Ba | 描述gydF4y2Ba | 变量gydF4y2Ba | 方程gydF4y2Ba | ||
|---|---|---|---|---|---|
|
|
|
外力功率gydF4y2Ba |
PgydF4y2BaFxExtgydF4y2Ba |
|
|
PwrFxDraggydF4y2Ba |
阻力功率gydF4y2Ba |
PgydF4y2BaDgydF4y2Ba |
|
|
|
wrStoredGrvtygydF4y2Ba |
重力势能的变化率gydF4y2Ba | PgydF4y2BaggydF4y2Ba |
|
|
PwrStoredxdotgydF4y2Ba |
纵向动能的变化率gydF4y2Ba |
PgydF4y2BaxdotgydF4y2Ba |
|
||
这些方程使用了这些变量。gydF4y2Ba
| 一个gydF4y2Ba | 稳态滚动阻力系数gydF4y2Ba |
| bgydF4y2Ba | 粘性传动系统和滚动阻力系数gydF4y2Ba |
| cgydF4y2Ba | 气动阻力系数gydF4y2Ba |
| ggydF4y2Ba | 重力加速度gydF4y2Ba |
| xgydF4y2Ba | 车辆相对于地面的纵向位移,在车辆固定框架内gydF4y2Ba |
车辆相对于地面的纵向速度,在车辆固定框架内gydF4y2Ba |
|
车辆纵向加速度相对于地面,车辆固定框架gydF4y2Ba |
|
| 米gydF4y2Ba | 车身质量gydF4y2Ba |
| ΘgydF4y2Ba | 道路坡度角gydF4y2Ba |
| FgydF4y2Ba总计gydF4y2Ba | 作用在车辆上的总力gydF4y2Ba |
| FgydF4y2Ba路gydF4y2Ba | 由于损失和重力载荷造成的阻性路面载荷gydF4y2Ba |
| PgydF4y2Ba总计gydF4y2Ba | 总牵引输入功率gydF4y2Ba |
| PgydF4y2Ba路gydF4y2Ba | 总功率由于损失和重力负荷gydF4y2Ba |
车辆垂直速度沿车辆固定gydF4y2Ba |
港口gydF4y2Ba
输入gydF4y2Ba
输出gydF4y2Ba
参数gydF4y2Ba
参考文献gydF4y2Ba
[1]吉莱斯皮,托马斯。gydF4y2Ba车辆动力学基础gydF4y2Ba.沃伦代尔,PA:汽车工程师协会(SAE), 1992年。gydF4y2Ba
[2]轻型车辆性能和经济衡量委员会。gydF4y2Ba使用滑行技术的道路负荷测量和测功机模拟gydF4y2Ba.标准J1263_201003。SAE国际,2010年3月。gydF4y2Ba
扩展功能gydF4y2Ba
版本历史gydF4y2Ba
另请参阅gydF4y2Ba
驱动周期来源gydF4y2Ba|gydF4y2Ba车身1DOF纵向gydF4y2Ba|gydF4y2Ba车身3DOF纵向gydF4y2Ba
您也可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba