导入AUTOSAR合成到Simulink金宝app
创建Simul金宝appink®模型由XML描述AUTOSAR软件组成。
从ARXML文件导入AUTOSAR合成到Simulink金宝app
这里是一个AUTOSAR软件组成,实现节气门位置控制系统。该组件包含六个相互连接的AUTOSAR软件组件原型——四个传感器/驱动器组件和两个应用组件。
该组合是在AUTOSAR创作工具中创建的,并导出到文件中ThrottlePositionControlComposition.arxml.

使用MATLAB函数createCompositionAsModel导入AUTOSAR XML (ARXML)描述,并创建AUTOSAR合成的初始Simulink表示。金宝app首先,解析ARXML描述文件并列出它包含的组合。
基于“增大化现实”技术= arxml.importer (“ThrottlePositionControlComposition.arxml”);名称= getComponentNames(基于“增大化现实”技术,“作文”)
名称=1 x1单元阵列{' /公司/组件/ ThrottlePositionControlComposition '}
对于列出的软件组成,使用createCompositionAsModel来创建一个Simulin金宝appk表示。
createCompositionAsModel(基于“增大化现实”技术,' /公司/组件/ ThrottlePositionControlComposition ');
/Company/Components/ThrottlePositionMonitor为5个组件中的组件2创建模型'ThrottlePositionSensor'/公司/组件/控制器创建模型的AccelerationPedalPositionSensor组件4 5:/公司/组件/ AccelerationPedalPositionSensor创建模型的ThrottlePositionActuator组件5 5:/公司/组件/ ThrottlePositionActuator创建模型的ThrottlePositionControlComposition作文1的1:/公司/组件/ ThrottlePositionControlComposition
该函数调用创建了一个组合模型,该模型包含6个组件模型,每个组件模型对应组合中的原子软件组件。金宝appSimulink的输入端口和输出端口代表AUTOSAR端口,信号线代表AUTOSAR组件连接器。

开发AUTOSAR组件算法,模拟和生成代码
在创建AUTOSAR组合的初始Simulink表示之金宝app后,您可以开发组合中的每个组件。对于每个组件,您都可以精炼AUTOSAR配置并创建算法模型内容。
例如,控制器组件模型中的ThrottlePositionControlComposition组合模型包含一个原子子系统Runnable_Step_sys,表示AUTOSAR周期可运行。的Runnable_Step_sys子系统包含控制器行为的初始存根实现。

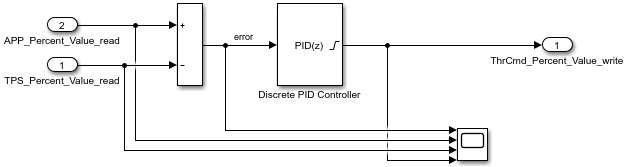
这里是节流位置控制器行为的一个可能的实现。(要探究此实现,请参阅模型autosar_swc_controller,示例中提供了该选项设计和模拟AUTOSAR组件并生成代码.)该组件将来自踏板位置传感器的APP传感器百分比值和来自节气门位置传感器的TPS百分比值作为输入。根据这些值,控制器计算错误. 错误是操作员希望油门位置(基于踏板传感器)与当前油门位置之间的差异。在此实现中,离散PID控制器块使用错误值计算油门指令百分比值,以提供给油门执行器。范围显示随时间变化的错误值和离散PID控制器块输出值。
当你开发AUTOSAR组件时,你可以:
在包含的组合中单独或一起模拟组件模型。
生成ARXML组件描述文件和算法C代码,用于在Simulink中测试或集成到AUTOSAR运行时环境中。金宝app(AUTOSAR代码生成需要Simulink Coder和Embed金宝appded Coder。)
有关开发、模拟和构建AUTOSAR组件的更多信息,请参见示例设计和模拟AUTOSAR组件并生成代码.
使用编辑工具的架构更改更新AUTOSAR合成模型
假设,在您将AUTOSAR软件组合导入Simulink并开始开发算法之后,对AUTOSAR创作工具中的组合进行了架构上的更改。金宝app
这是修改过的作文。这些更改删除了传感器组件,添加了记录器组件,并在组合和组件级别添加了端口和连接。在AUTOSAR创作工具中,修改后的合成被导出到文件中ThrottlePositionControlComposition_updated.arxml.

使用MATLAB函数调用updateModel从ARXML文件导入体系结构修订。该函数用这些变化更新AUTOSAR组成模型并报告结果。
ar2 = arxml.importer (“ThrottlePositionControlComposition_updated.arxml”);调用updateModel (ar2“ThrottlePositionControlComposition”);
更新型号'ThrottlePositionSensor'组件1的6:/Company/Components/ThrottlePositionSensor ###更新型号ThrottlePositionSensor ###保存原始型号为ThrottlePositionSensor_backup。slx ### # create HTML report ThrottlePositionSensor_update_report.html Updating model 'ThrottlePositionMonitor' for component 2 of 6: /Company/Components/ThrottlePositionMonitor ### #更新模型ThrottlePositionMonitor ### #保存原始模型为ThrottlePositionMonitor_backup。### # create HTML report ThrottlePositionMonitor_update_report.html Creating model 'Logger' for component 3 of 6: /Company/Components/Logger Updating model 'Controller' for component 4: /Company/Components/Controller ### # update model Controller ### #基金# # #创建HTML报告Controller_update_report.html更新模型的AccelerationPedalPositionSensor组件5 6:/公司/组件/ AccelerationPedalPositionSensor AccelerationPedalPositionSensor # # # # # #更新模型作为AccelerationPedalPositionSensor_backup保存原始模型。### #创建HTML报告AccelerationPedalPositionSensor_update_report.html更新模型' throttleposition致动器'的组件6:/Company/Components/ throttleposition致动器### #更新模型throttleposition致动器### #保存原始模型为ThrottlePositionActuator_backup。基金# # #创建HTML报告ThrottlePositionActuator_update_report.html更新模型的ThrottlePositionControlComposition组成1 1:/公司/组件/ ThrottlePositionControlComposition ThrottlePositionControlComposition # # # # # #更新模型作为ThrottlePositionControlComposition_backup保存原始模型。slx ###创建HTML报告ThrottlePositionControlComposition_update_report.html
更新之后,在组合模型中,高亮显示更改发生的位置。

该函数还生成并显示一个HTML AUTOSAR更新报告。该报告列出了对复合模型中的Simulink和AUTOSAR元素的更新所做的更改。金宝app在报告中,您可以单击超链接,从变更描述导航到模型变更,并从主报告导航到单个组件报告。
相关链接
你也可以从以下列表中选择一个网站: