离散距离过滤器
这个例子展示了几种离散陷波滤波器的技术的比较。虽然控制系统部件通常是在连续时间下设计的,但为了在数字计算机和嵌入式处理器上实现,它们通常必须离散化。
连续时间陷波滤波器
陷波器的设计是通过在特定频率上急剧衰减增益来拒绝信号内容。对于这个例子,我们考虑以下陷波器:
你可以画出滤波器的频率响应b命令:
H = TF([1 0.5 100],[1 5 100]);BODE(H),网格
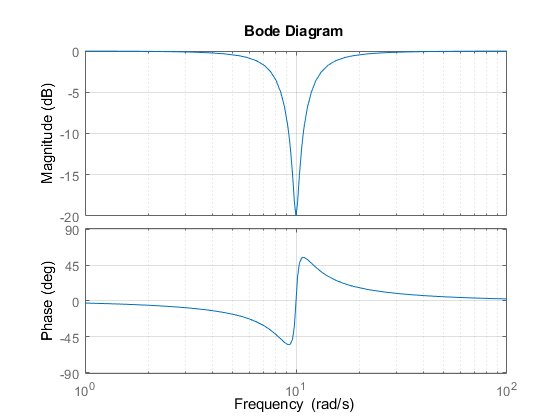
该凹口滤波器在频率w = 10 rad / s处提供20dB衰减。
选择离散化方法
你可以离散一个连续时间系统用汇集命令。控制系统工具箱™支持几种离散化算法,包括:金宝app
零阶持有
一阶持有
脉冲不变
Tustin(双线性近似)
频率预整的Tustin
匹配的杆和零
哪种方法选择取决于应用程序和要求。
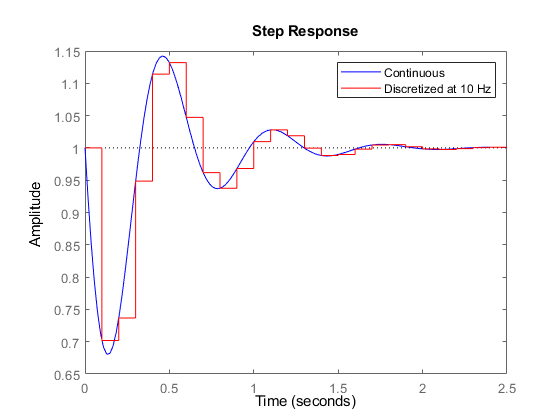
零级和一阶保持方法和脉冲不变方法非常适合于时域中的离散近似。例如,ZOH离散化的阶跃响应与每个时间步骤(独立于采样率)匹配连续时间步长响应:
t = 0.1;民=汇集(H, Ts,“zoh”);步骤(H,“b”,HDZ,“r”),传说('连续的',“以10hz离散化”)
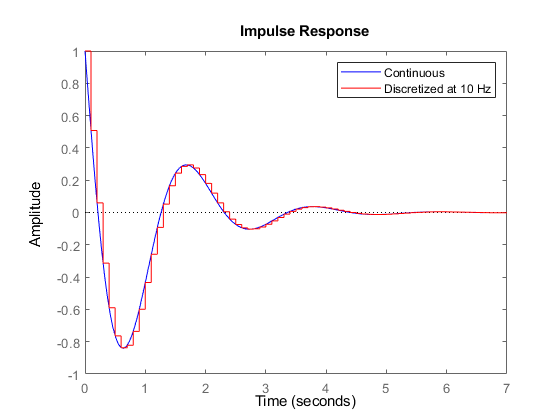
同样,脉冲不变离散化与原始系统相同的脉冲响应:
g = tf([1 -3],[1 2 10]);gd = c2d(g,ts,“小鬼”);冲动(G,“b”Gd,“r”)传说('连续的',“以10hz离散化”)
相比之下,Tustin和Matched方法往往在频域表现更好,因为它们在Nyquist频率附近引入较少的增益和相位失真。例如,比较连续时间陷波器的波德响应及其使用ZOH、Tustin和Matched算法的离散化:
HDT = C2D(H,TS,“tustin”);Hdm =汇集(H, Ts,'比赛');波德(H,“b”,HDZ,“r”热变形,'M'Hdm,‘g’,{1 100}),网格图例('连续的',“ZOH”,“Tustin”,“匹配”)
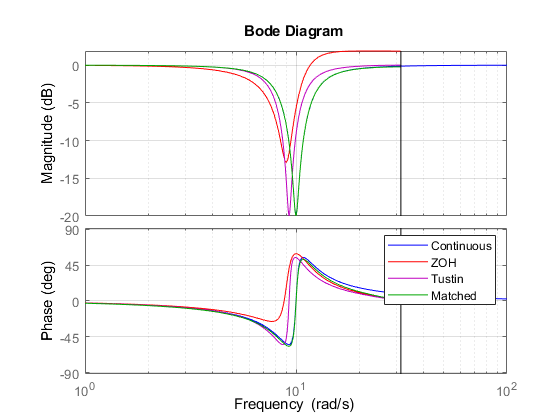
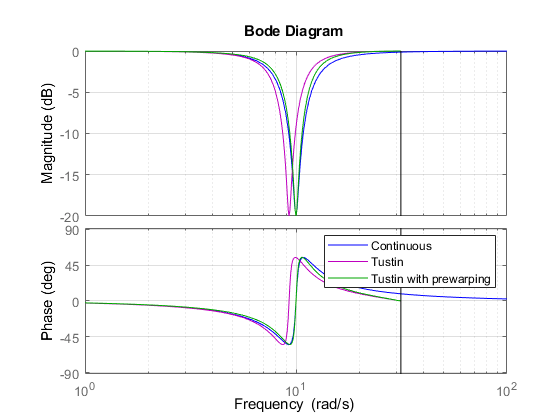
该比较表明匹配方法提供了陷波滤波器的最精确的频域近似。然而,您可以通过指定等于陷阱频率的预调高频率来进一步提高Tustin算法的准确性。这确保了靠近W = 10 rad / s的准确匹配:
HDP = C2D(H,TS,'prewarp'10);波德(H,“b”热变形,'M'黄芪丹参滴丸,‘g’,{1 100}),网格图例('连续的',“Tustin”,“与prewarping Tustin”)
选择采样率
采样率越高,连续响应和离散响应之间的匹配越接近。但是采样率能小到什么程度,或者说采样间隔能大到什么程度?作为一个经验法则,如果你想要连续和离散的模型紧密匹配到某个频率wm,确保奈奎斯特频率(采样率PI)至少是两次wm.对于陷波器,你需要保持10 rad/s附近的形状,所以奈奎斯特频率应该超过20 rad/s,这给出的采样周期最多为pi/20 = 0.16 s。
为了确认这一选择,将匹配的离散化与采样周期0.1、0.15和0.3进行比较:
Hd1 =汇集(H, 0.1,'M');Hd2 =汇集(H, 0.15,'M');Hd3 =汇集(H, 0.3,'M');波德(H,“b”,即“r”Hd2,'M'Hd3,‘g’,{1 100}),网格图例('连续的',“t = 0.1”,“t = 0.15”,'ts = 0.3')
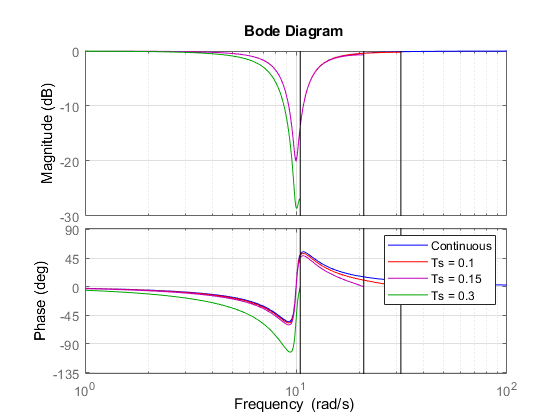
正如预测的那样,离散化仍然相当准确Ts < 0.16但开始分解更大的采样间隔。
交互式GUI
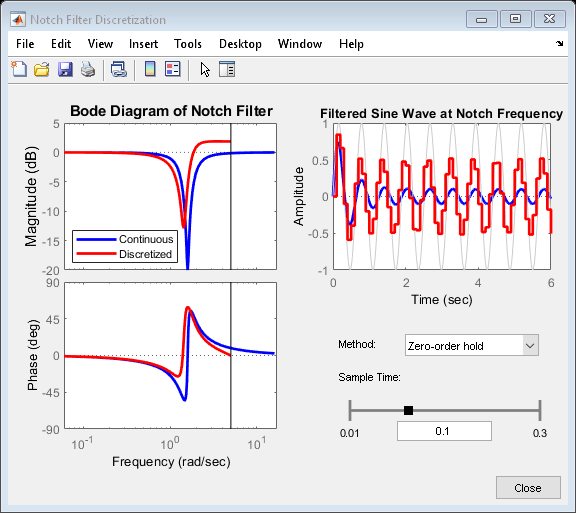
单击下面的链接以启动交互式GUI,进一步示出了离散化缺口过滤器的选择是如何选择离散化算法和采样率的影响。
Notch_Gui.
您还可以从以下列表中选择一个网站:
