Pole-Zero简化
极点-零简化通过取消极点-零对或消除对整个模型响应没有影响的状态,精确地降低了模型的阶次。例如,在构建闭环体系结构时,可以引入零极点对。与数值计算相关的正常小误差可以将这种对消对转化为近似对消对。删除这些状态保留了模型响应特性,同时简化了分析和控制设计。极点零化简的类型包括:
在模型减速器应用程序和减少模型的顺序活动编辑器任务Pole-Zero简化方法自动消除结构断开状态,并且还执行极零消除或最小的实现。
模型减速器应用程序中的极值零简化
模型减速器提供一个交互式工具,用于执行模型缩减,并检查和比较原始模型和降阶模型的响应。用极点零化简化简化模型模型减速器:
打开应用程序并导入模型以减少。例如,假设有一个名为的型号
构建在MATLAB®工作区。将打开以下命令模型减速器并导入LTI模型构建.modelReducer(建立)
在数据浏览器,选择要减少的模型。点击
 Pole-Zero简化.
Pole-Zero简化.
在Pole-Zero简化标签,模型减速器显示原始模型和简化模型的频率响应图。该应用程序还显示了两种模型的零点地图。
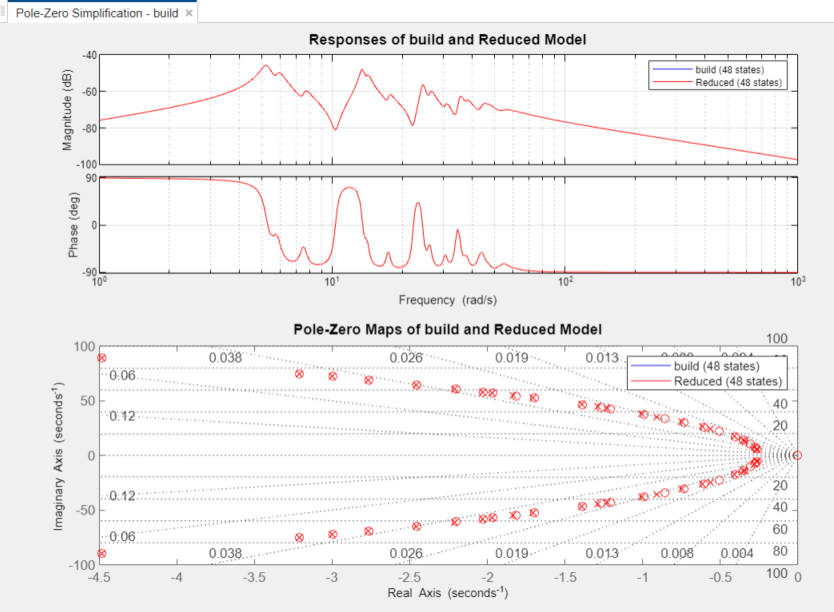
极值映射标记杆位置
X和零位置O..笔记
频率响应对于SISO模型是波德图,对于MIMO模型是奇值图。
可选地,改变容差模型减速器确定取消极点零对。模型减速器控件指定的公差范围内的极点零对取消极点零对的简化价值。在这种情况下,没有极零对将足够接近模型减速器以默认的容忍值取消它们
1E-05..若要取消距离稍远的对,请将滑块向右移动或在文本框中输入较大的值。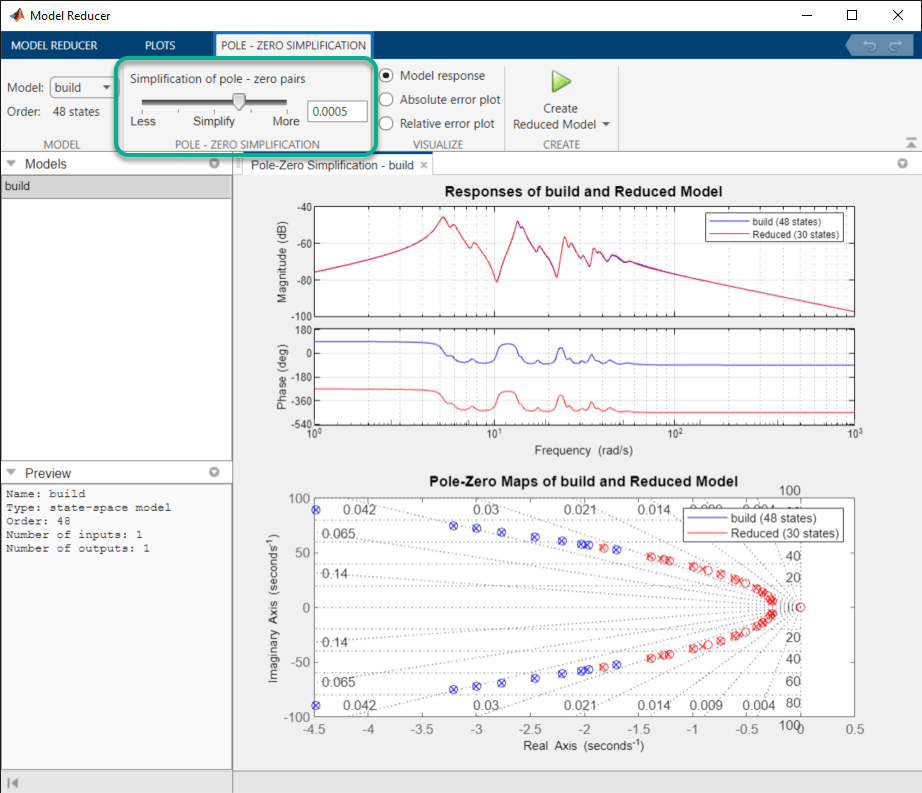
蓝色的
X和O.极值零地图上的标记显示了从简化模型中取消的原始模型中的近消除极零对。剩余的杆子和零在简化模型中标有红色X和O..在观察原始和简化模型的频率响应的同时尝试不同的简化公差。尽可能多地删除尽可能多的杆和零,同时保留对应用程序很重要的频率区域中的系统行为。可选地,检查原始和简化模型之间的绝对或相对误差。使用按钮选择错误图类型Pole-Zero简化选项卡。

有关使用分析图的更多信息,请参见在模型减速器应用程序中可视化缩小阶数.
当您有一个要存储和分析的简化模型时,请单击
 .新模型出现在数据浏览器使用反映模型顺序减少的名称。
.新模型出现在数据浏览器使用反映模型顺序减少的名称。
在创建缩小模型之后数据浏览器,您可以继续更改简化参数,并创建用于分析和比较的不同顺序的简化模型。





您现在可以对简化后的模型执行进一步的分析。例如:
检查减少系统的其他响应,例如阶跃响应或硝基洛斯图。为此,请使用工具绘图选项卡。看到在模型减速器应用程序中可视化缩小阶数想要查询更多的信息。
导出简化模型到MATLAB工作空间进一步分析或控制设计。在模型减速器选项卡,单击
 出口.
出口.
产生马铃薯极点零简化代码
要创建MATLAB脚本,可以在命令行中使用进一步的模型减少任务,请单击创建了模型,选择生成MATLAB脚本.

模型减速器创建使用该脚本minreal命令执行模型缩减,并使用您在Pole-Zero简化选项卡。该脚本在Matlab编辑器中打开。
命令行处的极值零取消
要在命令行上通过极点零取消来降低模型的顺序,请使用minreal.
创建以下系统的模型,其中C是pi控制器,G在
rad / s。这种低频零可以从植物动态中的某个地方的衍生作用产生。例如,该工厂可以包括从位置测量计算速度的组件。
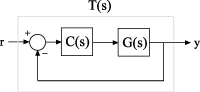
G = zpk (3 e-8 [1,3], 1);C = pid (0.3);T =反馈(G * C, 1)
T =(S + 0.3)(S-3E-08)------------------- S(S + 4.218)(S + 0.7824)连续时间零/极/增益模型。
在闭环模型中T.,集成商
从C非常近乎取消低频零G.
用原点附近的0来抵消积分器。
TRED =微米(T,1E-7)
TRED =(S + 0.3)------------------(S + 4.218)(S + 0.7824)连续时间零/杆/增益模型。
默认情况下,minreal通过取消精确的零极点对或在内部接近零极点对来降低传递函数的顺序SQRT(EPS).指定1E-7作为第二个输入原因minreal消除内部的极零对
彼此的Rad /s。
减少模型tr包含了原闭环模型的所有动力学特性T.,除了接近抵消的零极对。
比较原始和减少系统的频率响应。
BODE(T,TRED,“r——”) 传奇('T'那“tr”)
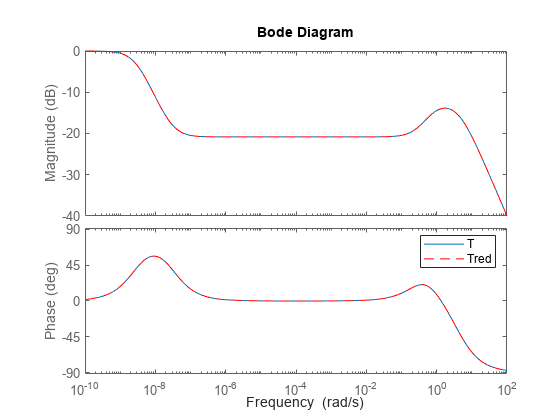
由于取消极点和零不完全匹配,原始模型中一些明显的极端低频动力学缺失tr.在许多应用程序中,您可以忽略这种极端的低频动态。当您增加匹配公差时minreal,确保您不会消除与您的应用相关的动态功能。
也可以看看
应用
职能
实时编辑任务
相关的话题
你也可以从以下列表中选择一个网站:
