主要内容
水箱中的水位控制
该模型显示如何在Simulink®模型中实现模糊推理系统(FIS)。金宝app
金宝appSimulink模型
该模型利用模糊逻辑控制器块实现的模糊推理系统来控制水箱中的水位。打开Sltank.模型。
Open_System('sltank')

对于这个系统,你可以用一个阀门来控制流入水箱的水。流出率取决于输出管道的直径,这是恒定的,以及罐内的压力,这是随水位变化的。因此,系统具有非线性特性。
模糊推理系统
模糊系统在FIS对象中定义,坦克,在Matlab®工作区中。有关如何在模糊逻辑控制器块中指定FIS的详细信息,请参阅模糊逻辑控制器。
模糊系统的两个输入是水位误差,等级以及水位的变化率,速度。每个输入都有三个隶属函数。
图Plotmf(坦克,'输入',1)图Plotmf(坦克,'输入'2)


模糊系统的输出是控制阀打开或关闭的速率,阀门,有五个会员职能。
Plotmf(坦克,'输出'1)

由于流出管的直径,该系统中的水箱比填满更慢地清空。为了弥补这种不平衡,是close_slow.和open_slow.阀门隶属函数不对称。PID控制器不支持这种不对称。金宝app
模糊系统有五个规则。前三个规则仅根据水位误差调整阀门。
如果水位可以,那么请勿调节阀门。
如果水位低,则快速打开阀门。
如果水位高,则快速关闭阀门。
另外两个规则根据水位在设定点附近时,根据水位的变化率调节阀门。
如果水位好的并且增加,则缓慢关闭阀门。
如果水位好的并且减少,则慢慢打开阀门。
坦克。规则
ANS = 1x5具有属性的Fisrule阵列:描述前所未切的重量连接详细信息:描述______________________________________ = = OKET =>阀门= NO_CHANGE(1)“2”级别== LOW =>阀门= OPEN_FAST(1)“3”级别== high =>阀门= close_fast(1)“4”电平== OKE和RATE ==阳性=>阀门=关闭(1)“5”级别== OKE和RATE ==负=>阀门= OPER_ONG(1)“
在此模型中,您还可以使用PID控制器控制水位。要切换到PID控制器,请将Const块设置为大于或等于零的值。
模拟
该模型模拟了在水位设定点周期性变化的控制器。运行仿真。
SIM('sltank',100)Open_System('sltank / comparison')

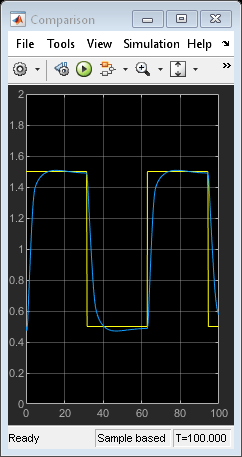
水位良好地跟踪设定值。您可以通过修改规则来调整控制器的性能坦克FIS。例如,如果您删除了类似于衍生控制动作的最后两种规则,则控制器执行差,水位中具有大的振荡。
也可以看看
块
相关的话题
您还可以从以下列表中选择一个网站:
