压电致动器的变形
此示例示出了如何解决耦合弹性-静电问题。
压电材料在外加电压下变形。相反,使压电材料变形就会产生电压。因此,对压电部件的分析需要求解一组以挠度和电势为因变量的耦合偏微分方程。
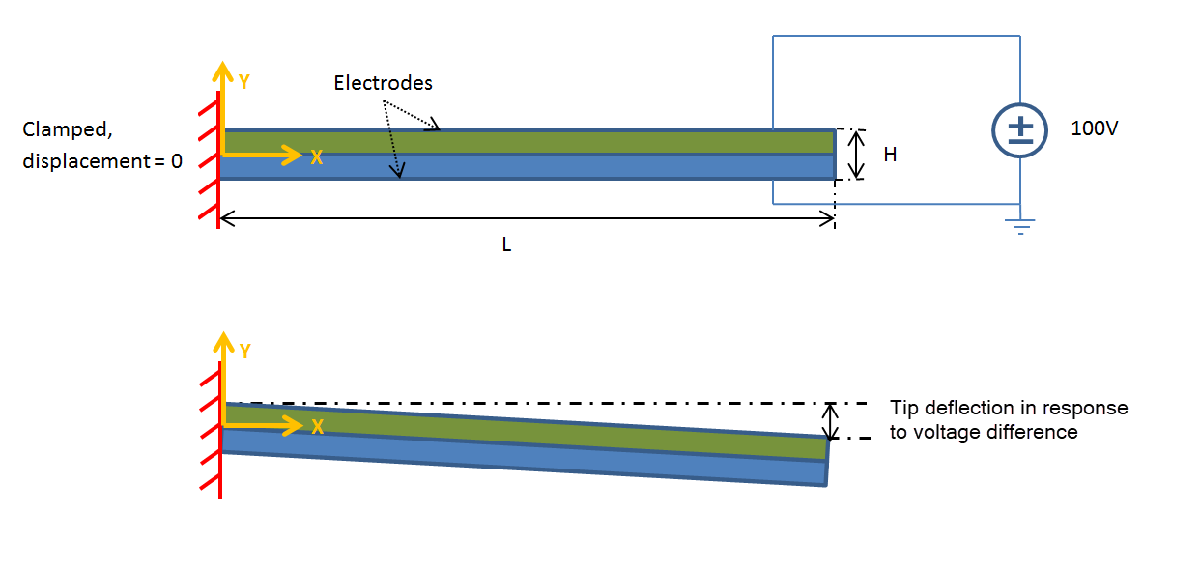
在这个例子中,模型是一个两层悬臂梁,两层由相同的聚偏氟乙烯(PVDF)材料制成。极化方向向下(负)y-方向)在顶层和点在底层。典型的长度与厚度之比为100。当你在光束的上下表面施加一个电压时,光束会偏转y- 方向由于是一层缩短,而另一个层延长。
平衡方程描述了固体的弹性行为:
在这里, 是应力张量,和 为物体力向量。高斯定律描述了固体的静电行为:
为电位移, 是免费派发的。将这两个PDE系统合并成一个系统:
对于2-d分析, 的组件 和 和 的组件 和 。
物料的构方程限定在应变张量和电场方面的应力张量和电位移矢量。平面应力的条件下正交各向异性压电材料的2-d的分析,可以写这些方程式
为弹性系数, 是电介电常数,和 为压电应力系数。这些方程中的压电应力系数符合传统的压电材料的记法,其中z-方向(第三方向)与材料的“极化”方向一致。对于二维分析,将“极化”方向与y设在。把应变向量写成x位移 和y位移 :
写在电势方面电场 :
您可以替换应变位移方程和电场方程到本构方程,并得到方程的应力和位移电器的系统就位移而言与电势的衍生物。代产生的方程式进PDE系统方程产生涉及的位移和电势衍生物的发散方程的系统。作为下一个步骤,安排这些方程,以匹配由工具箱所要求的形式。
偏微分方程工具箱™需要椭圆方程的系统中的矢量形式来表示:
或在张量形式:
重复的指标意味着求和。对于本例中的二维压电系统,系统矢量 是
这是一个 系统。的梯度 是
有关以工具箱所需的格式指定系数的详细信息,请参阅:
这个例子中的c系数是一个张量。你可以把它表示成一个2×2块的3×3矩阵:
为了将本构方程的项映射到工具箱所需的形式,将c张量和解的梯度写成这种形式:
从这个等式,可以将传统的构系数映射到对C矩阵所要求的形式。在方程中的电场减号并入C矩阵以匹配工具箱的约定。
梁几何
创建一个PDE模型。线性弹性方程有三个分量,所以模型必须有三个分量。
模型= createpde(3);
创建几何图形并将其包含在模型中。
L = 100 e - 3;%的光束长度米H = 1 e - 3;%的光束的总高H2 = H / 2;每层的高度(单位为米)topLayer = [3 4 0 L L 0 0 0 0 H2 H2];底层= [3 4 0 L L 0 -H2 -H2 0];gdm =[事务;bottomLayer] ';g = decsg (gdm,R1 + R2的[R1的;R2的]“);geometryFromEdges(模型中,g);
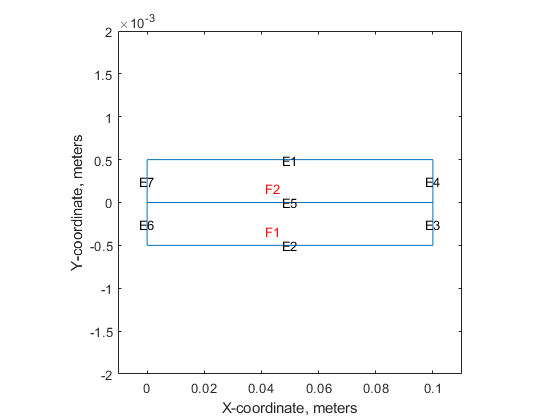
用面和边标签绘制几何图形。
图pdegplot(模型,“EdgeLabels”,“上”,“FaceLabels”,“上”)包含(“x坐标,米”)ylabel (“坐标,米”)轴([ - 1 * L,1.1 * L,-4 * H2,4 * H2])轴广场
材料特性
指定束层的材料性质。在这两个层中的材料是聚偏氟乙烯(PVDF),具有压电特性的热塑性聚合物。
E = 2.0 e9;弹性模量,N/m^2ν= 0.29;%泊松比G = 0.775e9;%剪切模量,N /平方公尺d31 = 2.2 e-11;%压电应变系数,C / Nd33 = -3.0 e-11;
指定在恒定应力的材料的相对电容率。
relPermittivity = 12;
规定真空的电介电常数。
permittivityFreeSpace = 8.854187817620 e-12;% F / mC11 = E/(1 -²);C12 =ν* C11;c2d = [C11 C12 0;C12 C11 0;0 0 G];pzeD = [0 d31;0 d33;0 0];
指定压电应力系数。
pzeE = C2D * pzeD;D_const_stress = [relPermittivity 0;0 relPermittivity] * permittivityFreeSpace;
将介电矩阵由恒应力转换为恒应变。
D_const_strain = D_const_stress - pzeD'*pzeE;
可以查看21个系数作为2×2块的3×3矩阵。该cij矩阵是在该矩阵的上三角的2×2块。
c11 = [c2d(1,1) c2d(1,3) c2d(3,3)];c12 = [c2d(1,3) c2d(1,2);c2d(3)汇集(2、3)];c22 = [c2d(3,3) c2d(2,3) c2d(2,2)];c13 = [pzeE(1,1) pzeE(1,2);pzeE (3,1) pzeE (2)];c23 = [pzeE(3,1) pzeE(3,2);pzeE (2, 1) pzeE (2, 2)];c33 = [D_const_strain(1,1) D_const_strain(2,1) D_const_strain(2,2)];ctop = [c11 (:); c12(:); c22(:); -c13(:); -c23(:); -c33(:)]; cbot = [c11(:); c12(:); c22(:); c13(:); c23(:); -c33(:)]; f = [0 0 0]'; specifyCoefficients(model,“米”,0,' d ',0,“c”,CTOP,“一个”,0,“f”,F,'面对'2);specifyCoefficients(模型,“米”,0,' d ',0,“c”芝加哥期货交易所,“一个”,0,“f”,F,'面对',1);
边界条件
设置在梁(边缘1)至100伏特的顶部上的电压(溶液组分3)。
voltTop = applyBoundaryCondition(模型,“混合”,“边缘”1,...“u”,100,...'EquationIndex'3);
指定该光束(边缘2)的底部由电压设定为0接地。
voltBot = applyBoundaryCondition(模型,“混合”,“边缘”,2,...“u”,0,...'EquationIndex'3);
指定左侧(刃6和7)通过设置夹持x- - -y-displacements(溶液组分1和2)为0。
clampLeft = applyBoundaryCondition(型号,“混合”,“边缘”者,...“u”[0 0],...'EquationIndex'1:2);
上的光束的右侧的应力和电荷是零。因此,使用边缘3和4中的默认边界条件。
有限元和解析解金宝搏官方网站
生成一个网格并求解模型。
msh = generateMesh(模型,'HMAX'5的军医);结果= solvepde(模型)
结果=固定结果与性质:NodalSolution: [3605x3双]XGradients: [3605x3双]YGradients: [3605x3双]ZGradients: [0x3双]Mesh: [1x1 FEMesh]
在节点位置访问解决方案。第一个列包含x-偏转。第二列包含y-偏转。第三列的电势。
rs = result.NodalSolution;
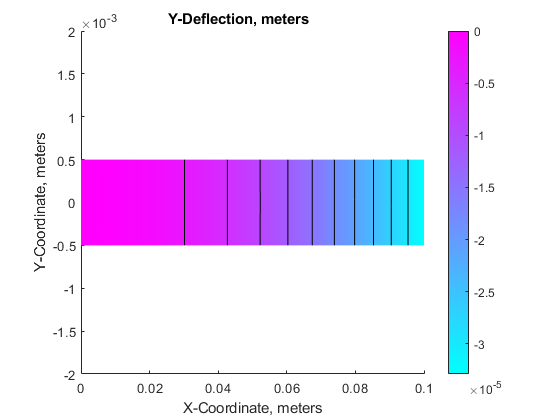
找到最小y-偏转。
feTipDeflection =分钟(RS(:,2));fprintf中(“有限元端部挠度为:%12.4e\n”,feTipDeflection);
有限元端部挠度为:-3.2900e-05
比较这个结果与已知的解析解。
tipDeflection = -3 * D31 * 100 * L ^ 2 /(8 * H2 ^ 2);fprintf中('分析端偏差为:%12.4e\n',tipDeflection);
分析端部挠度为:-3.3000e-05
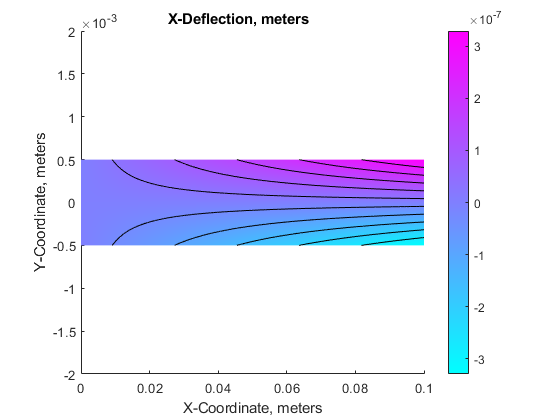
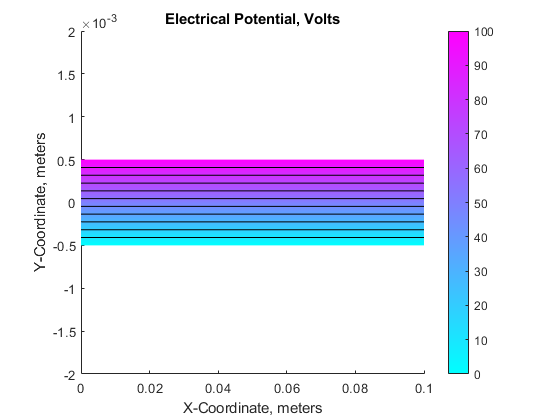
画出deflecton组件和电势。
varsToPlot = char ('X-变形,仪表',...'Y-变形,仪表',...“电势,伏特”);为I = 1:尺寸(varsToPlot,1)图。pdeplot(模型,'XYData',RS(:,i)中,'轮廓',“上”)标题(varsToPlot(I,:))缩放坐标轴,以便更容易地查看轮廓线轴([0,L,-4 * H2,4 * H 2])xlabel('X-坐标,米')ylabel (“y坐标米”)轴广场结束
参考文献
黄,胡硕和炫澈公园。“压电传感器和执行器的有限元建模。”AIAA杂志31,第5号(1993年5月):930-937。
Pieford,五“压电主动结构有限元建模。”博士论文,布鲁塞尔自由大学,2001。