端到端的单体雷达
此示例显示如何使用Simulink®建模端到端的单体雷达。金宝app单体雷达由与接收器结合的发射器组成。发射机产生脉冲,该脉冲击中目标并产生由接收器接收的回波。通过测量回声的时间位置,您可以估计目标的范围。该示例的第一部分演示了如何使用单个元素天线的等效检测单个目标的范围。该示例的第二部分将展示如何用4元元均匀的线性阵列(ULA)构建单体雷达,检测4个目标的范围。
可用的示例实现
这个例子包括两个Simulink®模型:金宝app
单身雷达与一个目标:slexMonostaticRadarExample.slx
有四个目标的单机Ula雷达:slexMonostaticRadarMultipleTargetsExample.slx
单身雷达与一个目标
该模型模拟了一个简单的端到端单体雷达。使用没有窄带传输阵列块的发射器块相当于建模单个各向同性天线元件。通过发射器块放大矩形脉冲,然后传播到自由空间中的目标。然后将噪声和放大在接收器前置放大器块中应用于返回信号,然后是匹配的滤波器。范围损耗得到补偿,并且脉冲是非混合的集成。大多数设计规范都来自于此设计基本的单体脉冲雷达系统对象的示例。
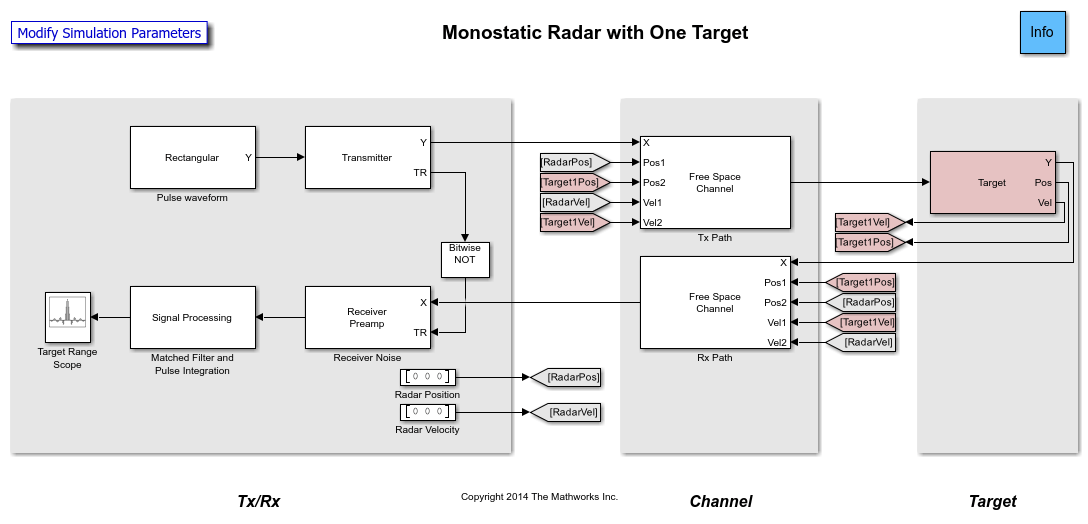
该模型由一个收发器、一个信道和一个目标组成。模型的每个部分对应的块是:
收发器
矩形-产生矩形脉冲。发射机- 放大脉冲并将发送/接收状态发送到接收器前置放大器块表示它是否正在发送。接收器前置放大器- 当变送器关闭时,从自由空间接收脉冲。该块还向信号增加了噪声。常数- 用于设置雷达的位置和速度。他们的价值观由此收到空闲空间块使用这块转到和从.信号处理- 子系统执行匹配过滤和脉冲集成。目标区间范围-显示集成脉冲作为范围的函数。
信号处理子系统

匹配滤波器- 执行匹配过滤以改善SNR。TVG- 补偿范围损失的时间变化。脉冲积分器-非相干集成多个脉冲。
通道
空闲空间- 应用传播延迟,损耗和多普勒转移到脉冲。一个块用于发射的脉冲,另一个块用于反射脉冲。这空闲空间障碍物需要雷达和目标的位置和速度。类提供的转到和从块。
目标
目标- 子系统根据指定的RCS反映脉冲。该子系统包括一个平台模型目标的速度和位置的块,提供给空闲空间块使用这块转到和从块。在这个例子中,目标是静止的,定位距离雷达1998米。
探索的例子
模型的几个对话框参数是由助手函数计算的求助者克朗斯特图radarparam..要从模型中打开功能,请单击“修改仿真参数块。这个函数在模型加载时执行一次。它将一个字段被对话框引用的结构导出到工作区。要修改任何参数,可以在命令提示符下更改结构中的值,也可以编辑helper函数并重新运行它以更新参数结构。
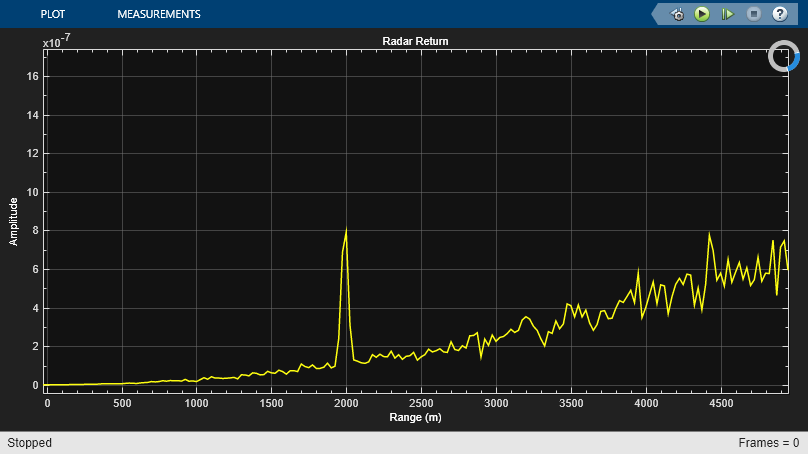
并显示结果
下图显示了目标的范围。从反射脉冲的往返延迟计算目标范围。从匹配滤波器输出的峰值测量延迟。我们可以看到目标距离雷达约2000米。此范围位于雷达的50米范围内,从实际范围内。
多个目标的单身雷达
该模型估计使用单体雷达的四个固定目标的范围。雷达收发器使用4元元均匀的线性天线阵列(ULA),以改善方向性和增益。波束形成器也包括在接收器中。目标位于1988,3532,3845和距雷达1045米处。
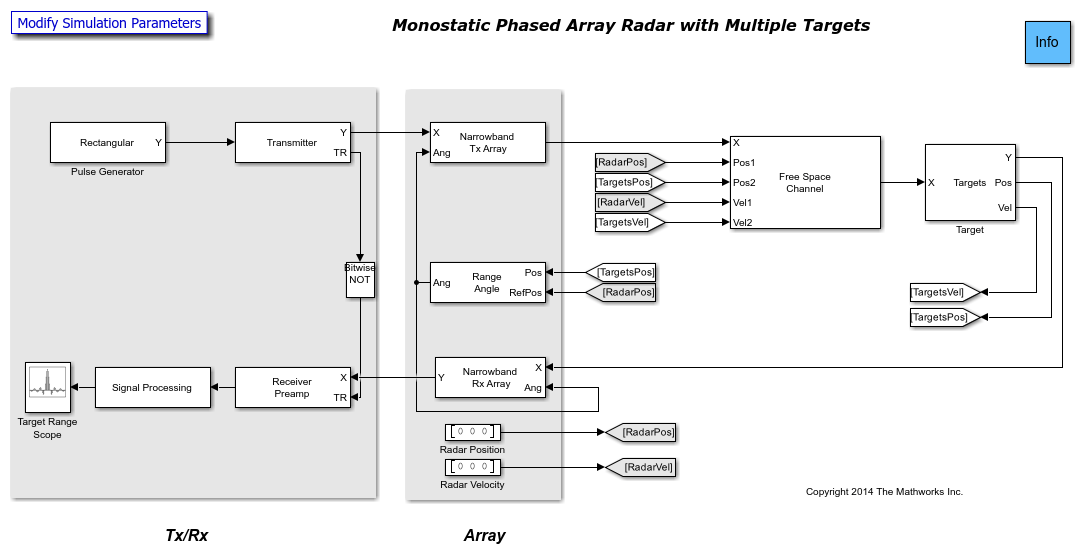
添加到上一个示例中的块是:
窄带TX阵列- 模拟用于传输窄带信号的天线阵列。使用块对话框的“传感器阵列”选项卡配置天线阵列。这窄带TX阵列块模型通过天线阵列在四个方向上的脉冲传输使用盎港口。该块的输出是四列的矩阵。每列对应于朝向四个目标的方向传播的脉冲。

窄带RX阵列- 模拟用于接收窄带信号的天线阵列。使用块对话框的“传感器阵列”选项卡配置数组。块从使用的四个方向接收脉冲盎港口。该块的输入是四列的矩阵。每列对应于从每个目标的方向传播的脉冲。块的输出是4列的矩阵。每个列对应于在每个天线元件处接收的信号。
角范围- 计算雷达和目标之间的角度。角度被使用窄带TX阵列和窄带RX阵列块来确定在哪个方向建模脉冲的发送或接收。
相移波束形成器-波束形成的输出接收器前置放大器.波束形成器的输入是一个由4列组成的矩阵,一列代表每个天线单元接收到的信号。输出是接收信号的波束形成矢量。
这个例子演示了如何使用single平台那空闲空间和目标模型所有四个双向传播路径的块。在平台块,初始位置和速度参数指定为3 × 4矩阵。每个矩阵列对应一个不同的目标。位置和速度输入空闲空间块来自输出平台块为3 × 4矩阵。同样,每个矩阵列对应一个不同的目标。的信号输入和输出空闲空间块有四列,一列用于到每个目标的传播路径。这空闲空间块已启用双向传播设置。“平均雷达横截面”(RCS)参数目标block被指定为四个元素的向量,代表每个目标的RCS。
探索的例子
模型的几个对话框参数是由助手函数计算的求助者克朗斯特图aradarmultipletargetsparam.要从模型中打开功能,请单击“修改仿真参数块。这个函数在模型加载时执行一次。它将一个字段被对话框引用的结构导出到工作区。要修改任何参数,可以在命令提示符下更改结构中的值,也可以编辑helper函数并重新运行它以更新参数结构。
并显示结果
下图显示了探测到的目标距离。目标距离由目标反射信号的往返时延计算。我们可以看到目标距离雷达大约2000米,3550米和3850米。这些结果与实际距离相比,在雷达的50米分辨率范围内。

你也可以从以下列表中选择一个网站:
