雷达,通信和EW系统中的频率敏捷性
此示例显示如何在雷达,通信和EW系统中建模频率敏捷性,以对抗干扰的影响。
介绍
主动电子转向相控阵系统可以使用相同的阵列硬件支持多个应用。金宝app这些应用程序可能包括雷达,EW和通信。但是,这些类型系统运行的RF环境是复杂的,有时是敌对的。例如,转发器干扰器可以重复接收的雷达信号并重新转发它以使雷达混淆。在一些文献中,这也被称为欺骗。频率敏捷性可以是对反应干扰源产生的信号的有效技术,并帮助支持这些系统的有效操作。金宝app
在这个例子中,我们首先建立一个具有固定单体雷达和移动飞机目标的场景。然后,该飞机产生混淆雷达的欺骗信号。一旦雷达检测干扰源,就可以采用频率敏捷性技术,其允许雷达克服干扰。
无干扰环境下的系统仿真
假设原点的X波段单体雷达。
fc = 10 e9;定义x波段雷达的工作频率FS = 2E6;%定义了系统的采样率C = 3E8;lambda = c / fc;radar_pos = [0; 0; 0];radar_vel = [0; 0; 0];
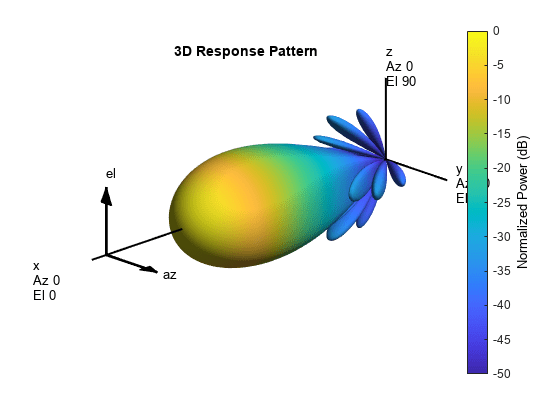
该雷达接收器也可作为电子战接收器,是一个64元(8x8)的半波长间距URA。
雷达%数组规范锥形= taylorwin (8);taperURA =锥形。*锥”;天线=分阶段。(精'元素',阶段.CosineantenneSelement,......'大小',[8 8],“ElementSpacing”,[Lambda / 2λ/ 2],......'锥形',taperura);
阵列的光束图案如下图所示。
图案(天线,FC,'类型'那'powerdb');
雷达透射线性FM脉冲。发射器和接收器规格是:
wav = phased.linearfmwaveform('samplerate',fs,......'pulsewidth', 10 e-5,'SweepBandwidth'1 e5,'prf', 4000,......'surformoffsetsource'那'输入端口');tx = phased.transmitter('收获'20,'峰值宝,500);TxArray = Phased.Widebaandradiator('samplerate',fs,......'传感器',天线,'承运人频繁',FC);rxarray = phased.widebandcollector('samplerate',fs,......'传感器',天线,'承运人频繁',FC);rxpreamp = phased.receiverProamp('收获'10,'噪音文件'5,......'samplerate',fs);
环境和目标描述如下。宽带传播通道被用来允许我们传播不同载波频率的波形。
target = phased.radartarget('veslrcs',100,“OperatingFrequency”,FC);target_pos = [8000; 1000; 1000];target_vel = [100; 0; 0];%外向和传入频道envout = phased.widebandfreespace(“TwoWayPropagation”假的,......'samplerate',fs,“OperatingFrequency”,fc,'繁殖',c);Envin = phased.widebandfreespace(“TwoWayPropagation”假的,......'samplerate',fs,“OperatingFrequency”,fc,'繁殖',c);
在该示例中,使用两个单向传播信道,因为干扰信号仅通过返回通道传播。
收到的回声可以被模拟为
rng (2017);[tgtRng, tgtAng] = rangeangle(target_pos, radar_pos);x = wav (0);%波形xt = tx (x);%传输xtarray = txArray(xt, tgtAng);%辐射yp = envout (xtarray radar_pos、target_pos radar_vel, target_vel);%宣传Yr =目标(YP);%反映ye = envin(Yr,target_pos,radar_pos,target_vel,radar_vel);%宣传yt = rxarray(ye,tgtang);%收集yt = rxpreamp(yt);%收到
我们可以使用2D波束扫描执行到达方向估计,并使用估计的方位角和高度角度来引导波束形成器。
估算器= Phased.BeamScanestImator2d('sensorarray',天线,......'doaoutputport',真实,......“OperatingFrequency”,fc,......'numsignals',1,......'azimuthscanangles',-40:40,......'海拔Canangles',-60:60);[〜,doa] =估计器(YT);Beamformer = Phased.SubBandPhaseShiftBeamFormer('sensorarray',天线,......“OperatingFrequency”,fc,“DirectionSource”那'输入端口'那......'samplerate',fs,'progeSoutputport',真的);[YBF,〜] =波束形成器(YT,DOA);
然后,波束形成的信号可以通过匹配的滤波器和检测器。
mfcoeff1 = getMatchedFilter(WAV);mf1 = phased.matchedFilter('系数',mfcoeff1);Y1 = MF1(YBF);nsamples = wav.samplege / wav.prf;t =((0:nsamples-1) - (numel(mfcoeff1)-1))/ fs;r = t * c / 2;绘图(R / 1000,ABS(Y1),' - ');网格在;Xlabel('范围(km)');ylabel('脉冲压缩信号幅度');
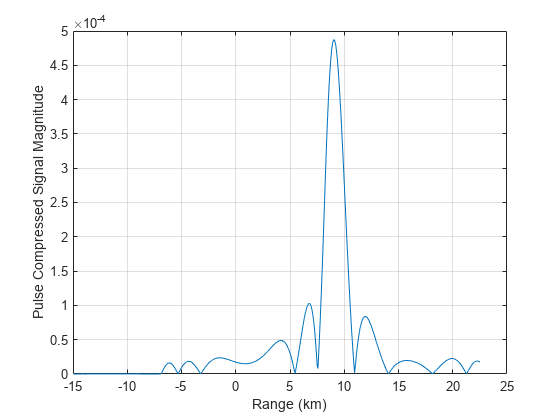
该图表明该目标在接收信号中产生了主导峰。
目标/干扰机信号分析
在上面的例子中,雷达工作得非常好。然而,在复杂的环境中,干扰会影响雷达的性能。干扰可能来自其他系统,如无线通信信号或干扰信号。现代雷达系统必须能够在这样的环境中工作。
相控阵雷达可以使用空间处理过滤出干扰。如果目标和干扰源不紧密地位于角度空间中,则波束成形可能是抑制干扰器的有效方法。更多细节可以在其中找到阵列模式合成示例。
该示例侧重于目标和干扰紧密地位的情况,使得空间处理不能用于分离两者。考虑目标飞行器可以确定从雷达发送的信号特性的情况,并使用该信息来产生将混淆雷达接收器的脉冲。这是一种用于干扰或欺骗的常用技术,以从真正的目标绘制雷达。
检测到的信号特性如下所示
PW =(脉冲宽(ABS(YP),FS));prf = round(1 / pulsepeiod(abs(π(π; yp]),fs));bw = obw(yp,fs,[],95);fprintf('波形特征:\ n');
波形特点:
fprintf('脉冲宽度:\ t \ t%f \ n',pw);
脉冲宽度:0.000100
fprintf('prf:\ t \ t \ t%f \ n',prf);
PRF:4000.000000
fprintf('扫描带宽:\ t%f \ n',bw);
扫描带宽:112041.098255
干扰器需要一些时间来完成这些分析并为干扰信号做好准备,因此很难立即创建有效的欺骗信号,但通常在几个脉冲间隔内,干扰信号准备好,干扰器可以将其放在一个任意位置内与真正的目标相比,脉冲使欺骗目标看起来更近的或父亲。值得注意的是,利用最新的硬件,估计信号特性所需的时间急剧下降。
假设干扰机想要将信号发射到约5.5 km外,干扰机可以在合适的时间发送干扰信号,引入相应的延迟。此外,由于这是从干扰机到雷达的单向传播,所需的功率要小得多。这确实使得干扰非常有效,因为它不需要太多的功率就能使雷达失明。
jwav = phased.linearfmwaveform('samplerate',fs,......'pulsewidth',pw,'SweepBandwidth',bw,'prf',prf);xj = jwav();NPAD = CEIL(5500 /(C / FS));XJ = Cirsprift(XJ,NPAD);%PAD零引入相应的延迟txjam = phased.transmitter('收获',0,'峰值宝5);xj = txjam(xj);ye = envin(Yr + xj,target_pos,radar_pos,target_vel,radar_vel);yt = rxarray(ye,tgtang);yt = rxpreamp(yt);YBFJ =波束形成器(YT,DOA);Y1J = MF1(YBFJ);%JAMMER加上目标返回绘图(R / 1000,ABS(Y1J));网格在;Xlabel('范围(km)');ylabel('幅度');标题('脉冲压缩从目标和干扰返回');
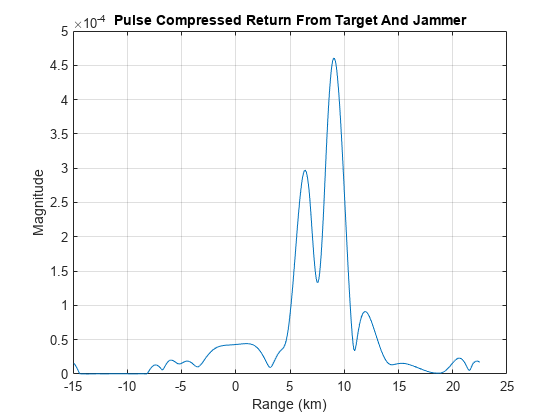
现在接收到的信号既包含期望的目标返回信号,也包含干扰信号。此外,干扰信号似乎更近。因此,雷达更有可能锁定最近的目标,认为一个是最突出的威胁,并在真正的目标上花费较少的资源。
频率敏捷性抵抗干扰
采用预先设定的跳频计划是减小雷达接收机干扰的一种可能方法。在这种情况下,从雷达发射的波形可能会不时地改变载波频率。由于跳频序列只有雷达知道,干扰机无法立即跟上变化。相反,在产生新的干扰信号之前,它需要花费更多的时间来获取正确的载波频率。它还需要更先进的干扰机硬件,以便能够在更宽的带宽上处理信号传输。因此,频率跳变可以在不受欺骗信号影响的情况下创造一个雷达工作的时间间隔。此外,在干扰机有效产生欺骗信号之前,雷达可以再次跳变。
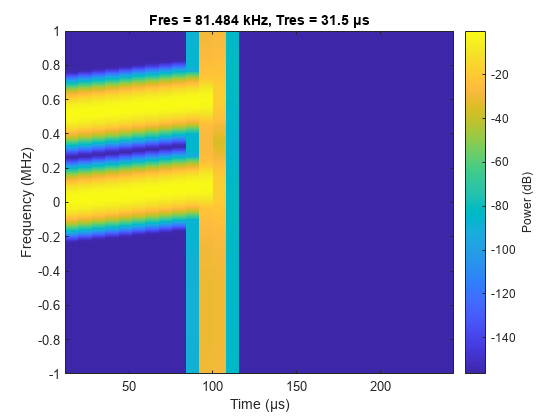
在下面的情况下,假设发送的信号从10GHz的原始载波频率跳跃500kHz。因此,新的波形信号变为
deltaf = fs / 4;xh = wav(deltaf);%跳跃信号
下图显示了原始信号和跳跃信号的频谱图。注意,跳跃信号是与原始信号相比频域的偏移。
pspectrum (x + xh fs,'谱图')
使用早期部分中概述的类似方法,可以使用新的波形模拟雷达回波。注意,由于干扰器不知道这跳,所以干扰信号仍然是相同的。
xth = tx(xh);xtharray = txArray(xth,tgtang);yph = envout(xtharray,radar_pos,target_pos,radar_vel,target_vel);YRH =目标(YPH);yeh = envin(yrh + xj,target_pos,radar_pos,target_vel,radar_vel);yth = rxarray(yeh,tgtang);yth = rxpreamp(yth);YBFH =波束形成器(YTH,DOA);
由于跳频调度是雷达已知的,信号处理算法可以利用该信息提取当前载波频率附近的频带。这有助于抑制其他波段的干扰,同时也提高了信噪比,因为其他波段的噪声被抑制了。另外,当波形跳变时,匹配滤波器也需要相应的更新。
让我们现在将相应的带通滤波器和匹配的滤波器应用于接收的信号。
首先,使用信号的带宽创建带通滤波器。
ButterCoef =黄油(9,BW / FS);
然后,我们可以用载波调制所产生的带通滤波器,以在该载波频率周围获得带通滤波器。
BF2 = ButterCoef。* Exp(1i * 2 * Pi * Deltaf *(0:Numel(ButterCoef)-1)/ FS);
类似地,需要也需要调制匹配的滤波器系数。
mfcoeff2 = getMatchedFilter(WAV,“FrequencyOffset”, deltaf);mf2 =分阶段。MatchedFilter ('系数', mfcoeff2);%提取带和应用匹配过滤器YB2 = MF2(过滤器(BF2(:),1,YBFH));%绘制匹配的滤波信号图(R / 1000,ABS(YB2));网格在;Xlabel('范围(km)');ylabel('幅度');标题('脉冲压缩信号');
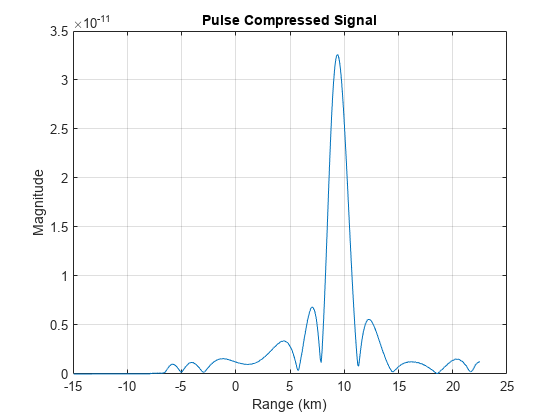
该图表明,随着采用跳频,可以分离目标回波和干扰信号。由于干扰器仍处于原始频带,因此在新频带中仅出现真正的目标回声,其中波形当前占据,从而抑制了干扰器的影响。
总结
实例表明,在复杂的射频环境下,采用频率捷变可以有效地抑制干扰。算例仿真了一个具有跳频波形的系统,验证了该技术有助于雷达系统在不受干扰信号干扰的情况下识别真实目标回波。
你也可以从以下列表中选择一个网站: