基于目标检测的PRF敏捷性
在雷达操作中,通常需要根据目标返回调整操作模式。此示例显示如何根据雷达检测模拟改变其脉冲重复频率(PRF)的雷达。
可用示例实现
此示例包括一个Simulink®型号:金宝app
PRF敏捷基于雷达检测:slexprfschedulingexample.slx.
基于雷达检测的动态PRF选择
该模型模拟了一个单身雷达,用于搜索5公里的明确范围的目标。如果雷达在2公里内检测到目标,则它将切换到更高的PRF,以仅查找具有2公里范围的目标,并提高其检测高速目标的能力。
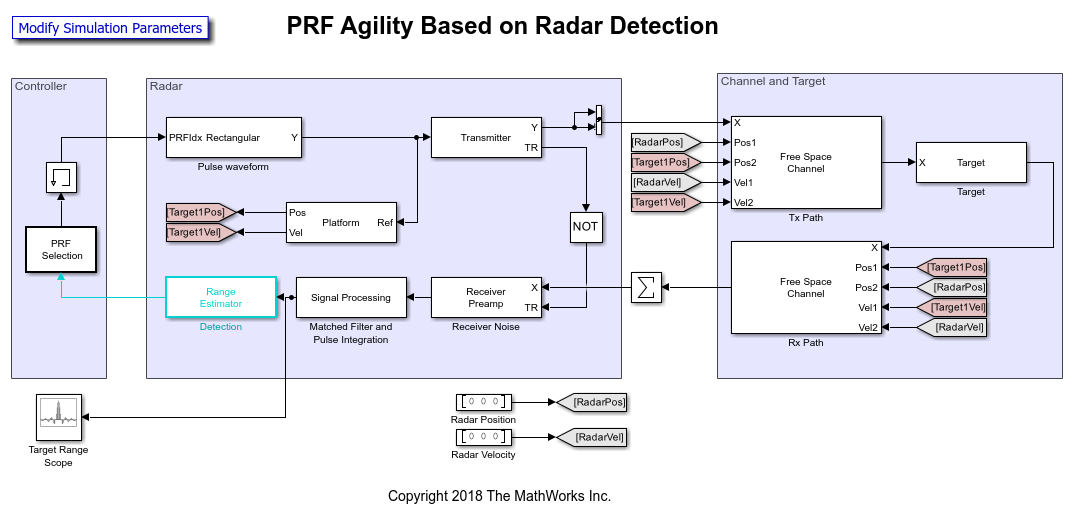
该系统非常类似于所用的内容在Simulink中模拟雷达接收器的测试信号金宝app具有以下显着差异的示例:
波形块不再是源块。相反,它需要一个输入,
idx.,选择要使用的PRF。可用的PRF值在波形对话框的PRF参数中指定。每次传输波形时,其对应的PRF也会设置应发送下一个脉冲的时间。
现在有一个控制器可以确定用于下一个传输的PRF。在信号处理链结束时,估计目标范围。控制器将使用此信息来确定哪些PRF选择下一个传输。
编译模型后,由于波形PRF的可能变化,通知通过系统的信号的长度可以变化。
该模型利用新的可控采样时间,因此系统在由不同的PRF值确定的适当时间内运行。
探索示例
模型的几个对话框参数由helper函数计算helperslexPRFSchedulingSim。要从模型中打开功能,请单击“修改仿真参数块。该函数在加载模型时执行一次。它将其字段被对话框引用的结构导出到工作空间。要修改任何参数,可以在命令提示符处更改结构中的值,或者编辑helper函数并重新运行它来更新参数结构。
结果和显示
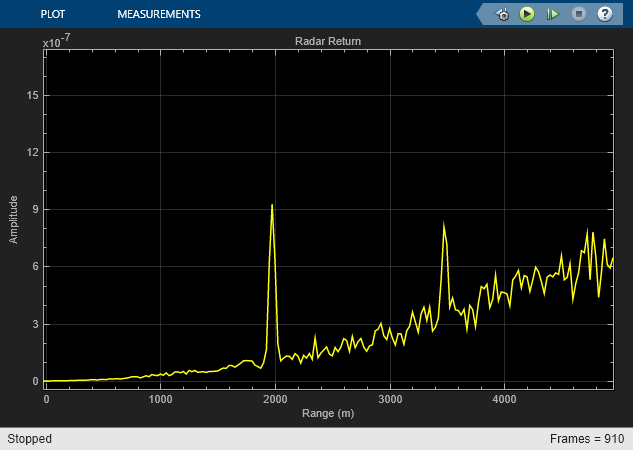
下图显示了目标的检测范围。从来自目标的反射信号的往返时间延迟计算目标范围。在仿真开始时,雷达检测到两个目标,距离略有2公里,另一公里距离约3.5公里。
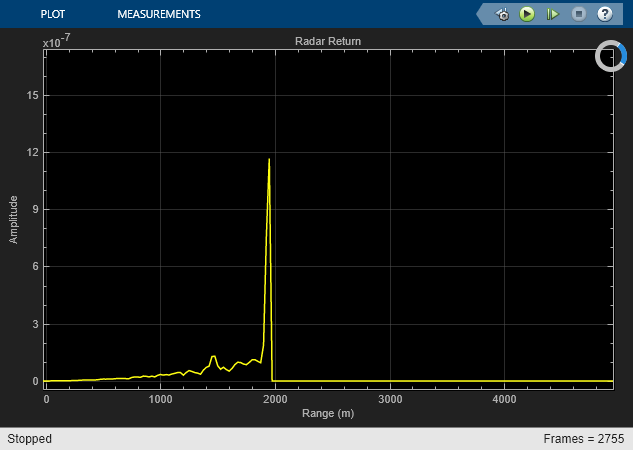
经过一段时间,第一目标进入2公里的区域并触发了PRF的变化。然后接收的信号仅覆盖高达2公里的范围。显示屏零填充,以确保绘图限制不会改变。请注意,由于范围歧义,3.5公里的目标折叠到1.5公里范围内。
总结
此示例显示如何在Simulink®中构建雷达系统,该系统基于目标检测范围动态改变其PRF。金宝app交错的PRF系统可以类似地建模。
您还可以从以下列表中选择一个网站: