用主动声纳系统探测水下目标
这个例子展示了如何模拟一个有两个目标的主动单基地声纳场景。声纳系统由一个各向同性投影阵列和一个水听器单元组成。投影仪阵列是球形的。水听器接收后向散射信号。所接收的信号包括直接和多径贡献。
水下环境
在浅水环境中,声源与目标之间存在多条传播路径。在这个例子中,假设在一个深度为100米、恒定音速为1520米/秒的通道中有五条路径。为了突出多路径的效果,使用0.5 dB的底部损耗。
定义水下环境的属性,包括信道深度,传播路径的数量,传播速度和底部损耗。
numpaths = 5;propspeed = 1520;channeldepth = 100;Isopath {1} = phased.ispeedunderwaterpaths(...“ChannelDepth”,channeldepth,...“NumPathsSource”,'财产',...'numpaths',numpaths,...'繁殖'propSpeed,...'bottomlloss',0.5,...'twowaypropagation',真正的);isopath{2} =分阶段。IsoSpeedUnderwaterPaths (...“ChannelDepth”,channeldepth,...“NumPathsSource”,'财产',...'numpaths',numpaths,...'繁殖'propSpeed,...'bottomlloss',0.5,...'twowaypropagation',真正的);
接下来,为每个目标创建多径通道。多径通道沿多个路径传播波形。该两步过程类似于设计过滤器并使用所得系数来过滤信号。
fc = 20 e3;%工作频率(Hz){1} =阶段性频道。MultipathChannel (...'运行频率'、fc);{2} = phased.multipathchannel(...'运行频率'、fc);
声纳目标
方案有两个目标。第一目标更遥远,但具有更大的目标强度,第二个是更近的,但具有较小的目标强度。两种目标都是同向的同位于声纳系统的静止。
tgt {1} = phased.backscattersonArtarget(...“TSPattern”, 5 * (181361));tgt{2} =分阶段。BackscatterSonarTarget (...“TSPattern”,-15 *那些(181,361));tgtplat {1} = phased.platform(...'初始位置', 500;1000;-70年),“速度”, (0;0;0]);tgtplat{2} =分阶段。平台(...'初始位置', 500;0;-40],“速度”, (0;0;0]);
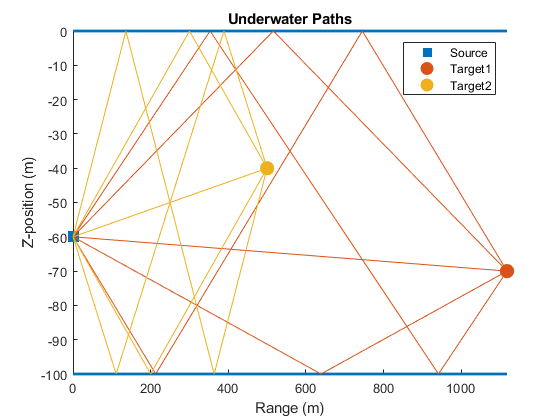
目标位置以及信道属性确定信号传播的水下路径。绘制声纳系统和每个目标之间的路径。注意,z坐标确定深度,零对应于通道的顶表面,x-y平面中的距离被绘制为源和目标之间的范围。
HelperplotPaths([0; 0; -60],[500 500; 1000 0; -70 -40],...channeldepth,numpaths)
发射器和接收器
传输波形
接下来,指定要传输到目标的矩形波形。最大目标范围和所需的范围分辨率定义波形的属性。
maxrange = 5000;最大明确范围Rangeres = 10;%所需的范围分辨率prf = propspeed /(2 * maxrange);%脉冲重复频率pulse_width = 2 *管理员/ propSpeed;%脉冲宽度pulse_bw = 1 / pulse_width;%脉冲带宽fs = 2 * pulse_bw;% 采样率wav = phased.rectangularwaveform(...“脉冲宽度”pulse_width,...脉冲重复频率的脉冲重复频率,...'采样率'fs);
使用传输的波形采样率更新多径通道的采样率。
频道{1} .samplere = fs;Channel {2} .Samplere = FS;
发射机
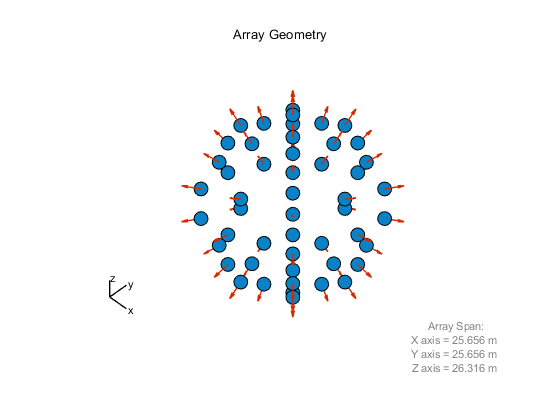
发射机由半球形阵列的背部挡板各向同性投影仪元件组成。发射器位于表面以下60米处。创建数组并查看阵列几何。
平台=分阶段。平台(...'初始位置', (0;0;-60],...“速度”, (0;0;0]);项目分阶段。IsotropicProjector (...'频率范围',[0 30e3],'voltageresponse', 80,'底板',真正的);[upountPosition,ElementNormal] = evergersPeralalProjector(8,Fc,Propspeed);projarray = phased.conormalArray(...“ElementPosition”,元素,...'ElementNormal'ElementNormal,“元素”、项目);viewArray (projArray“出明的人”,真正的);
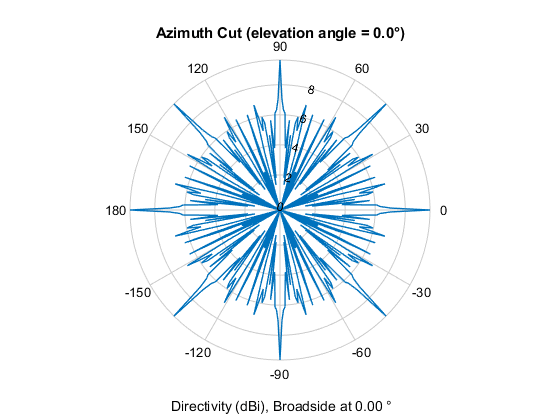
在俯仰角为零的情况下查看阵列的模式。方向性在方位角上表现出峰值,对应于阵列单元的方位角位置。
模式(fc, projArray 180:180 0“CoordinateSystem”,'极性',...'繁殖',概述);
接收者
接收器由水听器和放大器组成。水听器是单个各向同性元素,频率范围为0到30 kHz,其中包含多径通道的工作频率。将室内电压灵敏度指定为-140 dB。
水电=分阶段。IsotropicHydrophone (...'频率范围',[0 30e3],“VoltageSensitivity”, -140);
接收信号中存在热噪声。假设接收器具有20dB的增益和10dB的噪声系数。
rx = phased.receiverProamp(...“获得”, 20岁,...'噪音文件'10...'采样率',fs,...'Seedsource','财产',...“种子”, 2007);
散热器和收集器
在主动声纳系统中,声波传播到目标,被目标散射,然后被水听器接收。辐射器由于阵列几何形状而产生传播波的空间依赖性。同样地,集电极结合了水听器单元从远场目标接收到的背散射信号。
散热器=相位。'传感器'projArray,'运行频率',...FC,'繁殖',概述);收集器=阶段.Collector('传感器',水电,'运行频率',fc,...'繁殖',概述);
声纳系统仿真
接下来,在十个重复间隔上传输矩形波形,并模拟每个传输处的Hydrophate处接收的信号。
x = wav();%产生脉冲发射= 10;rx_pulses = 0(大小(x, 1),发射);t =(0:大小(x, 1) 1) / fs;为了J = 1:XMITS%更新目标和声纳位置[sonar_pos,sonar_vel] =平台(1 / prf);为了i = 1:2%循环目标[tgt_pos,tgt_vel] = tgtplat {i}(1 / prf);%计算使用图像方法的传输路径。路径是%根据CoherenceTime属性更新。[路径,dop,alloss,tgtang,srcang] = isopath {i}(...sonar_pos tgt_pos,...sonar_vel tgt_vel 1 /脉冲重复频率);%计算辐射信号。转向目标的阵列。tsig =散热器(x, srcAng);%通过通道传播辐射信号。tsig ={我}频道(tsig、路径、计划下,树脂黄);% 目标tsig = tgt{我}(tsig tgtAng);%收藏家RSIG =收集器(TSIG,SRCANG);RX_PURSENS(:,j)= rx_pulses(:,j)+...RX(RSIG);结尾结尾
绘制接收信号的非相干积分的大小,以确定两个目标的返回位置。
图rx_pulses = pulsint(rx_pulses,'无组织');图(t,abs(rx_pulses))网格在Xlabel('时间'')ylabel(“振幅(V)”) 标题(集成接收脉冲的)
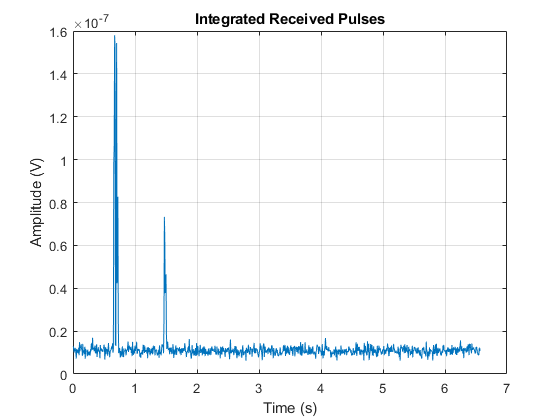
目标之间相隔较远,看起来是明显的回波。放大第一次返回。
XLIM([0.55 0.85])
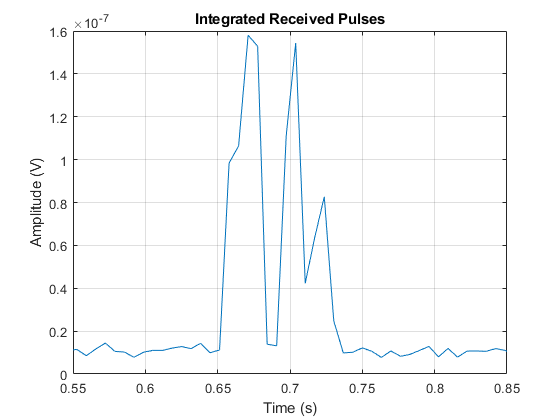
目标返回是来自多个传播路径的脉冲的叠加,导致每个目标有多个峰值。由此产生的峰值可能被误解为额外的目标。
主动声纳和行李员
在上一节中,声速作为信道深度的函数是恒定的。相比之下,像Bellhop这样的光线跟踪程序可以为空间变化的声速配置文件产生声学路径。您可以使用Bellhop生成的路径信息通过多径通道传播信号。使用“MUNK”声速型材在无目标环境中模拟各向同性投影仪和各向同性水电器之间的传输。路径信息包含在Bellhop到达文件(MunkB_eigenray_arr.ARR)中。
钟楼配置
在此示例中,通道深度为5000米。源位于1000米的深度,接收器位于800米的深度。它们在范围内分开100公里。导入和绘制Bellhop计算的路径。
(路径,夹住,树脂黄、rcvAng srcAng] = helperBellhopArrivals (fc 6假);helperPlotPaths ('munkb_eigenray')
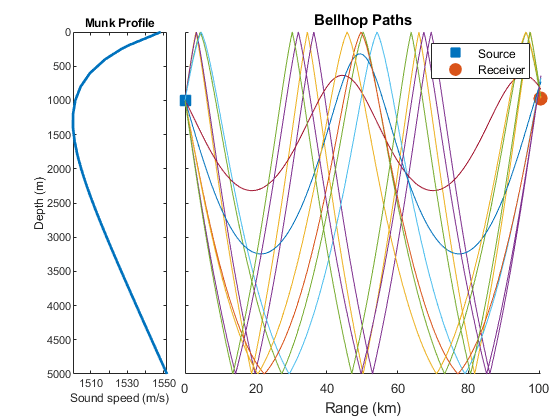
对于这个场景,有两条没有界面反射的直接路径,以及八条在顶部和底部表面都有反射的路径。在水深约1250米的地方,声速最低,越往上越快,越往下越快,最高可达1550米/秒。
创建新的频道和接收器以与Bellhop的数据一起使用。
释放(收集器)ChannelBellhop = Phased.MultiPathChannel(...'采样率',fs,...'运行频率'、fc);rx = phased.receiverProamp(...“获得”10...'噪音文件'10...'采样率',fs,...'Seedsource','财产',...“种子”, 2007);
为新的问题配置指定一个脉冲。
maxRange = 150000;最大明确范围prf = propspeed /(maxrange);%脉冲重复频率pulse_width = 0.02;wav = phased.rectangularwaveform(...“脉冲宽度”pulse_width,...脉冲重复频率的脉冲重复频率,...'采样率'fs);
Bellhop模拟
接下来,模拟从发射机到接收器的十个脉冲的传输。
x = repmat (wav(), 1大小(路径,2));发射= 10;rx_pulses = 0(大小(x, 1),发射);t =(0:大小(x, 1) 1) / fs;为了J = 1:XMITS%投影仪tsig = x。* proj(fc,srcang)';%通过通道传播辐射信号。tsig = channelBellhop (tsig、路径、计划下,树脂黄);%收藏家RSIG =收集器(TSIG,RCVANG);RX_PURSENS(:,j)= rx_pulses(:,j)+...RX(RSIG);结尾
绘制传输脉冲的非相干积分。
图rx_pulses = pulsint(rx_pulses,'无组织');图(t,abs(rx_pulses))网格在XLIM([6670])Xlabel('时间'')ylabel(“振幅(V)”) 标题(集成接收脉冲的)
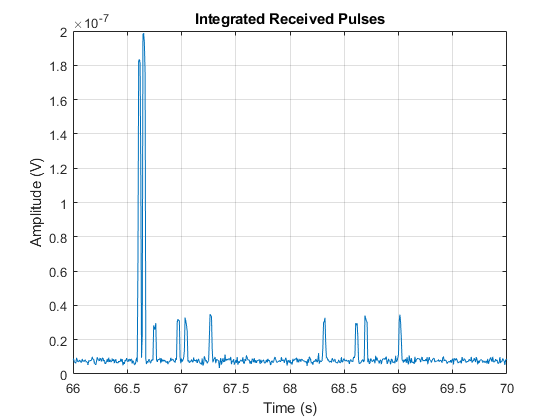
发送的脉冲显示为响应中的峰值。请注意,两个直接路径没有接口反射,首先到达并具有最高幅度。在比较直接路径接收的脉冲时,第二脉冲到达的第二脉冲具有较高的两个幅度,表示传播距离较短。较短路径的延迟时间可以通过它传播通过信道的最慢的部分来解释。由于通道底部的多个反射,剩余的脉冲与直接路径相比具有降低的幅度,每种反射都会有助于损耗。
概括
在本例中,声波脉冲在浅水和深水环境中传输和接收。利用矩形波形,主动声纳系统探测到浅水中两个分离良好的目标。接收到的信号中明显存在多条路径。接下来,脉冲通过Bellhop生成的路径在深水中通过“Munk”声速剖面在投影仪和水听器之间传输。注意到空间变化的声速的影响。
参考
Urick,罗伯特。水下声音原则.加利福尼亚,洛斯阿尔托斯:半岛出版社,1983。
您还可以从以下列表中选择一个网站: