利用自校准调节阵列不确定性
这个例子展示了一个基于约束优化过程的自校准过程。利用机会源同时估计阵列形状的不确定性和源方向。
这个例子需要优化工具箱™.
介绍
从理论上讲,可以设计出完美的均匀线阵(ULA)执行各种处理,如波束形成或到达方向估计。通常,该阵列在部署前将在受控环境中进行校准。但是,系统在运行期间可能会出现不确定性,表明阵列需要重新校准。例如,环境影响可能会导致阵列ele这些不确定性的存在会导致阵列处理算法的检测、分辨率和估计性能迅速下降。因此,尽快消除这些阵列不确定性至关重要。
有许多阵列校准算法。本示例重点介绍其中的一类,自校准(也称为自动校准),其中不确定性与未知位置的多个外部源的位置联合估计[1]。与飞行员校准不同,这允许在不太熟悉的环境中重新校准阵列。但是,一般来说,这会导致少量的信号观测和大量未知量。解决此问题的方法有多种,如[2]所述。一种是针对成本函数进行构造和优化。这些成本函数往往是高度非线性的,并且包含局部极小值。在本例中,基于多信号分类(MUSIC)算法[3]的成本函数形成,并使用优化工具箱(TM)作为fmincon优化问题进行求解.在文献中,还存在许多其他组合[2]。
完美的阵列
首先考虑部署一个具有半波长间距的5元ULA。在这样的数组中,可以很容易地计算出元素的位置。
N=5;设计位置=[零(1,N);-(N-1)/2:(N-1)/2;零(1,N)]*0.5;
不太完美的阵列
接下来,假设阵列在运行时受到扰动,因此在x和y维度上阵列形状不确定。为了固定全局轴,假设第一个传感器和到第二个传感器的方向是[4]中规定的。
rng违约pos_std = 0.02;perturbed_pos = designed_pos + pos_std*[randn(2,N);零(1,N)];perturbed_pos (: 1) = designed_pos (: 1);%参考传感器无故障%的不确定性perturbed_pos(1、2)= designed_pos(1、2);x轴向下固定为%假设%另一个传感器已知
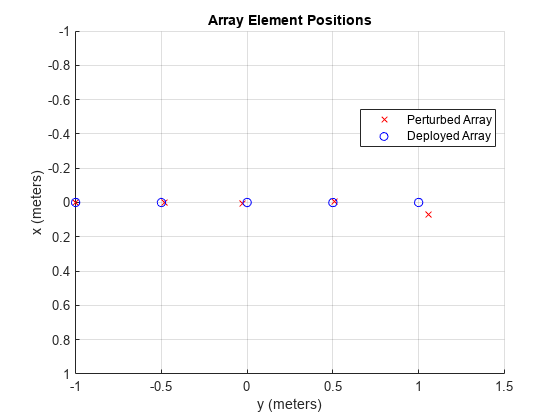
将阵列缺陷可视化
下图显示了部署阵列和扰动阵列之间的区别。
helperCompareArrayProperties (“位置”,扰动位置,设计位置,...{“摄动数组”,“已部署阵列”}); 视图(90,90);
波达方向估计的退化
上一节显示了已部署阵列与在运行时受到扰动的阵列之间的差异。如果盲目使用为部署的阵列设计的处理,阵列的性能会降低。例如,考虑波束扫描估计器用于估计在20, 40和85度方位角的3个未知源的方向。
%以30dB信噪比生成100K样本ncov = db2pow (-30);Nsamp = 1 e5;%快照数量(样本)incoming_az = (-20, 85);%待估计的未知源位置M=长度(输入_az);[x_pert,~,Rxx]=传感器信号(扰动位置、Nsamp、输入信号、ncov);%估计源的方向齿龈=分阶段。齿龈(“NumElements”,N);空间谱=相位波束扫描估计器(“传感器阵列”,乌拉,...“DOAOutputPort”符合事实的“NumSignals”,M);[y,估计的_az]=空间谱(x_pert);进货
进货=1×3-20 40 85
估计值
估计值=1×3-19 48 75
这些不确定性降低了阵列的性能。自校准可以允许阵列使用机会源重新校准,而不需要知道它们的位置。
自我校准
许多自校准方法基于优化成本函数,以联合估计未知阵列和源参数(如阵列传感器和源位置)。必须仔细选择成本函数和优化算法,以鼓励尽可能轻松快速地获得全局解决方案。此外,必须针对给定场景调整与优化算法相关的参数。文献中存在许多成本函数和优化算法的组合。对于这个示例场景,选择了音乐成本函数[3]和fmincon优化算法。随着场景的变化,可能适合根据校准算法的稳健性调整使用的方法。例如,在本例中,校准算法的性能随着震源远离末端火力或阵列元素数量的增加而下降。将先前估计的源位置的初始估计用作优化过程的初始化准则。
fun=@(x_in)HelperMusiciation(x_in,Rxx,designed_pos);nvars=2*N-3+M;%假设二维不确定性nvars-M x0 = (0.1 * randn(1日),estimated_az);%初始值locTol=0.1;%位置公差angTol = 20;%角度公差lb=[-locTol*个(nvars-M,1);估计值。'-angTol];%下限ub=[locTol*个(nvars-M,1);估计值+angTol];%上界选择= optimoptions (“fmincon”,“托尔康”1 e-6“DerivativeCheck”,“开”,...“显示”,“关闭”);[x, fval exitflag] = fmincon (x0有趣, ,[],[],[],[], 磅,乌兰巴托,[]选项);%解析最终结果[~, perturbed_pos_est postcal_estimated_az] = helperMUSICIteration (...x Rxx designed_pos);
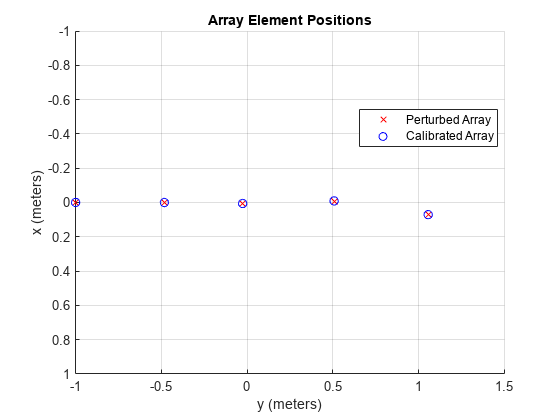
helperCompareArrayProperties (“位置”perturbed_pos perturbed_pos_est,...{“摄动数组”,“校准数组”}); 视图(90,90);
polarplot(函数(incoming_az), (1 1 1),'s',...:函数(postcal_estimated_az (1)), (1 1 1),“+”,...函数(estimated_az), (1 1 1),“哦”,“线宽”,2,“MarkerSize”10)传说(“正确的方向”,“校准后的DOA”,...“DOA之前校准”,“位置”,[0.01 0.02 0.3 0.13]) rlim([0 1.3])
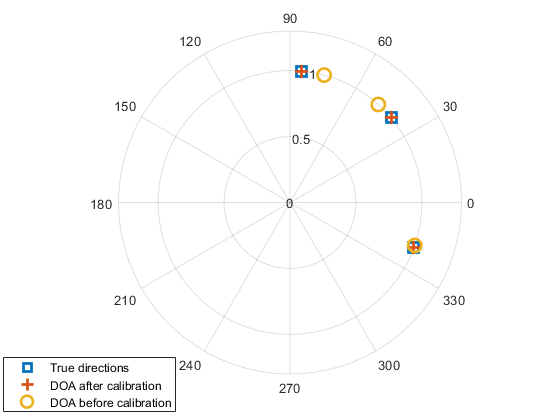
通过这个标定过程,源估计的精度得到了显著的提高。此外,还对微扰传感器的位置进行了估计,可作为未来新的阵列几何模型。
总结
该示例显示了阵列形状不确定性如何影响估计未知源到达方向的能力。该示例还说明了如何使用自校准来克服这些扰动的影响,并同时估计这些不确定性。
工具书类
[1]Van Trees, H.最佳阵列处理。纽约:Wiley-Interscience, 2002。
[2] E Tuncer和B Friedlander。经典和现代到达方向估计。爱思唯尔,2009年。
[3] 多发射器位置和信号参数估计〉,《天线和传播的IEEE交易》。第AP-34卷,1986年3月,第276-280页。
Y. Rockah和P. M. Schultheiss。使用未知位置的源的阵列形状校准。第I部分:Farfield源IEEE反式。ASSP 35:286 - 299, 1987。
你也可以从以下列表中选择一个网站:
