主要内容
雷达和电子战系统
阵列设计,虚拟阵列,波形,参数提取,信号分类
本节包含工具箱在雷达和电子战(EW)系统中的应用。一些例子包括:
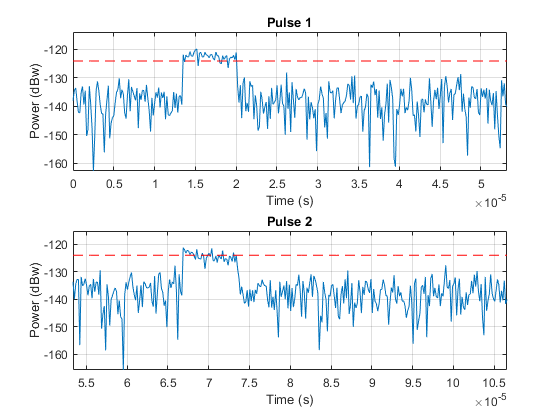
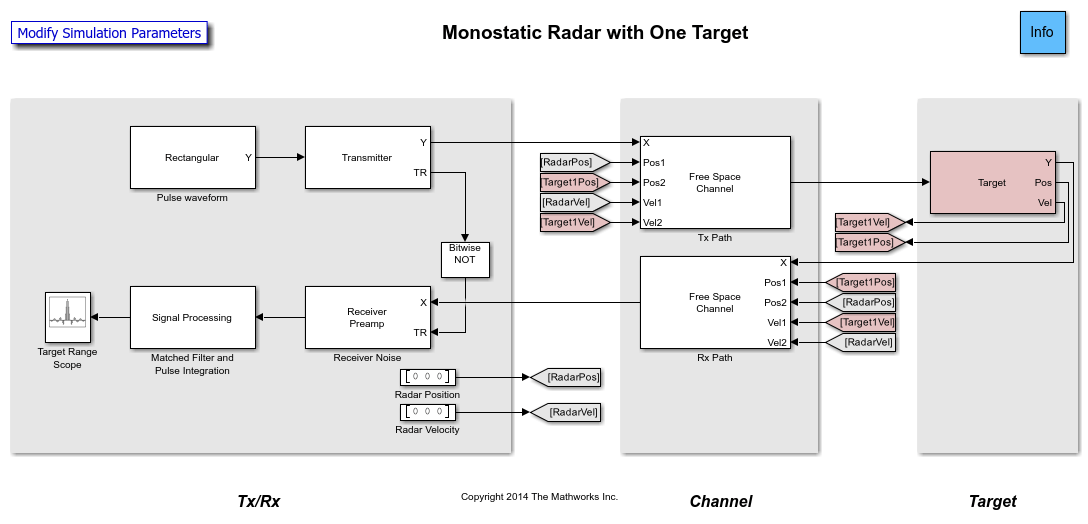
建立一个端到端的雷达系统。
设计一种运动目标指示雷达。
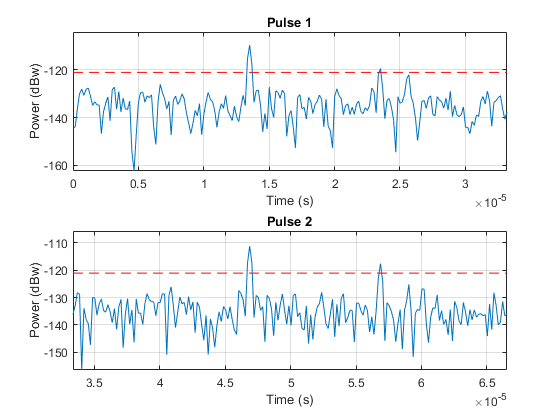
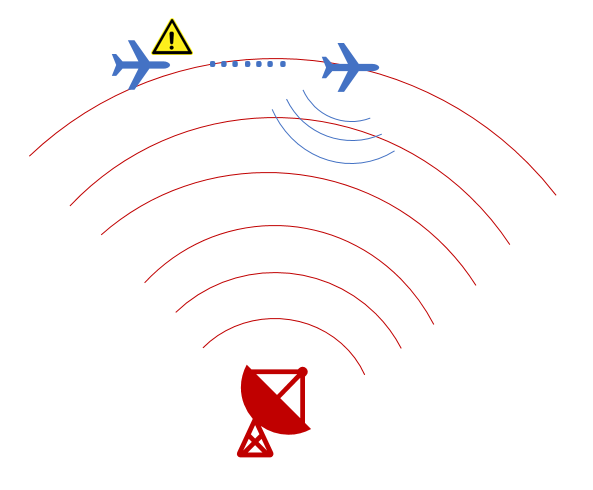
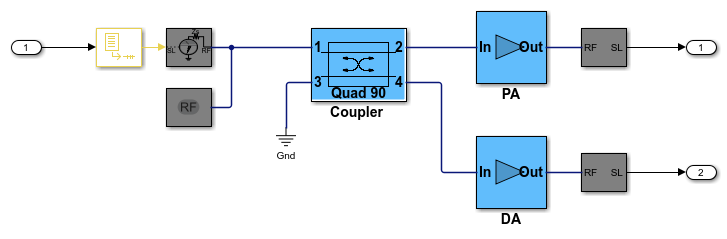
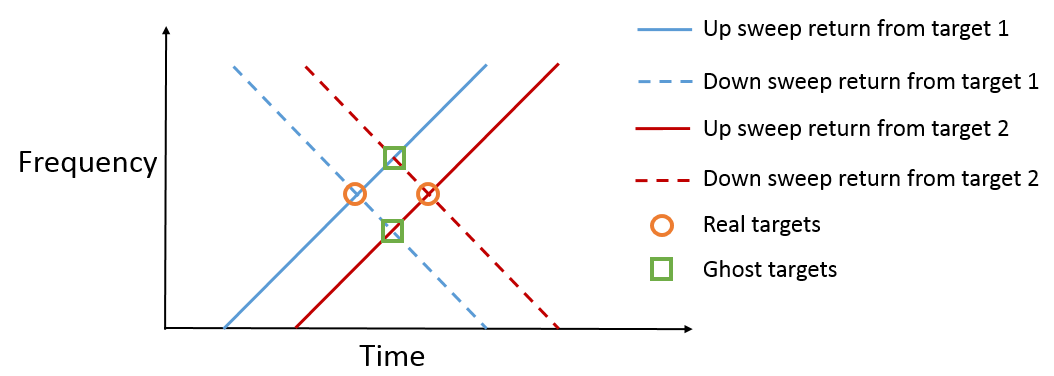
模型雷达频率灵敏,以对抗干扰和干扰。
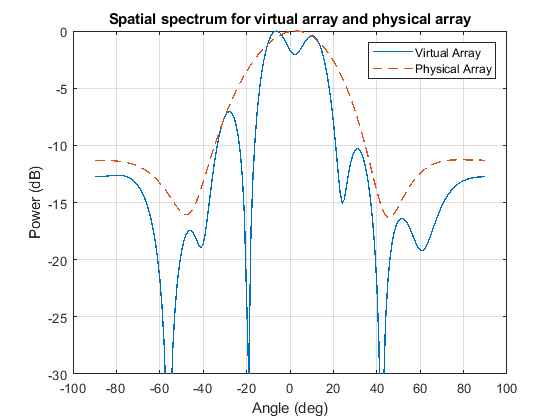
估计返回信号的参数,以提高目标的定位。
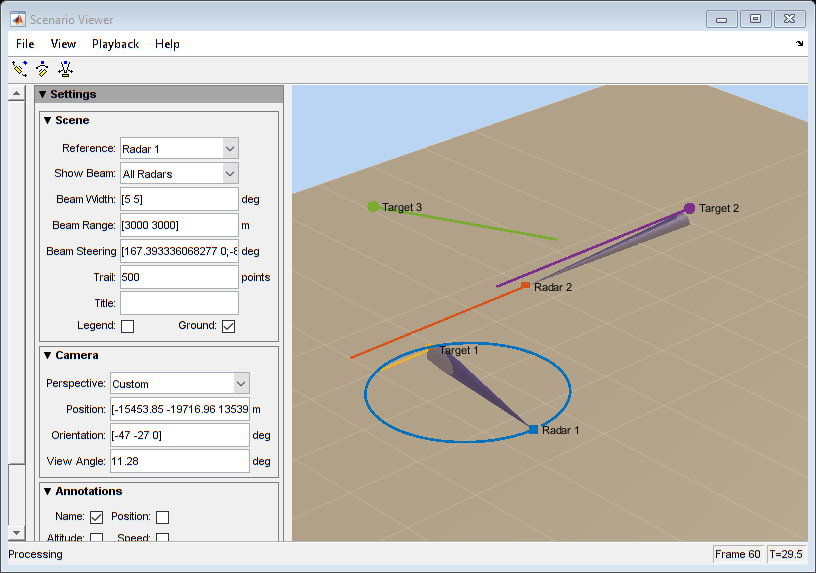
为驾驶场景模拟雷达硬件、信号处理和传播环境。使用自动驾驶工具箱对车辆运动建模并跟踪合成车辆检测。
特色的例子

您也可以从以下列表中选择一个网站:
