角度多普勒响应
Angle-Doppler响应
- 库:
相控阵系统工具箱/时空自适应处理
描述
的角度多普勒响应块计算输入信号的角度多普勒响应。输出响应是一个矩阵,它的行表示多普勒箱,列表示角度箱。
港口
输入
输出
参数
指定PRF为—PRF值的来源
财产(默认)|输入端口
PRF值的来源,指定为财产或输入端口.当说明符为财产,脉冲重复频率(Hz)参数设置PRF。当设置为输入端口,传入PRF脉冲重复频率输入端口。
脉冲重复频率(Hz)-脉冲重复频率
1(默认)|正标量
脉冲重复频率(PRF),指定为正标量。单位是赫兹。与any中设置的值保持一致波形在模拟中使用的库块。
依赖关系
若要启用此参数,请设置指定PRF为参数财产.
仰角来源-仰角源
财产(默认)|输入端口
仰角源,指定为财产或输入端口.取值为
财产 |
的仰角(度)此块的参数指定仰角。 |
输入端口 |
属性设置仰角埃尔输入端口。 |
仰角(度)-仰角用于计算角度-多普勒响应
0(默认)|标量
用于计算角度-多普勒响应的仰角,指定为标量。单位是度。角度必须在-90°到90°之间。
例子:-45年
依赖关系
若要启用该参数,请设置仰角来源来财产
数据类型:双
角度箱数-角度采样数量
256(默认)|大于2的正整数
角域内用于计算角-多普勒响应的采样数,指定为大于2的正整数
例子:600
数据类型:双
多普勒箱数量-角度采样数量
256(默认)|大于2的正整数
多普勒范围内用于计算角度多普勒响应的样本数量,指定为大于2的正整数
例子:128
数据类型:双
输入模式坐标系-自定义天线图案坐标系
az-el(默认)|phi-theta
自定义天线模式的坐标系,指定az-el或phi-theta.当你指定az-el,使用方位角(度)而且仰角(度)参数指定模式点的坐标。当你指定phi-theta,使用角度(度)而且角度(度)参数指定模式点的坐标。
依赖关系
若要启用该参数,请设置元素类型来定制天线.
角度(度)- Phi角坐标自定义天线辐射模式
0:360|实值1-by-P行向量
指定天线辐射模式的点的Phi角,指定为1 × -的实值P行向量。P必须大于2。角度单位是度。Phi角必须在0°和360°之间,并且严格递增。
依赖关系
若要启用此参数,请设置元素类型参数定制天线和输入模式坐标系参数phi-theta.
角(度)- Theta角坐标自定义天线辐射模式
0:180|实值1-by-问行向量
要指定天线辐射模式的点的角度,指定为1 × -的实值问行向量。问必须大于2。角度单位是度。角必须在0°到360°之间,并且严格递增。
依赖关系
若要启用此参数,请设置元素类型参数定制天线和输入模式坐标系参数phi-theta.
MatchArrayNormal-旋转天线元件至阵列法线
在(默认)|从
选中此复选框可旋转天线元件图形,使之与阵列法线对齐。未选中时,元素图案不会旋转。
当天线在天线阵列中使用时输入模式坐标系参数是az-el,选中此复选框将旋转图案,以便x元素坐标系的-轴指向数组法线。不选择使用没有旋转的元素模式。
当天线在天线阵列中使用时输入模式坐标系设置为phi-theta,选中此复选框将旋转图案,以便z元素坐标系的-轴指向数组法线。
参数与数组正常参数。URA所言而且UCA数组。
依赖关系
若要启用该参数,请设置元素类型来定制天线.
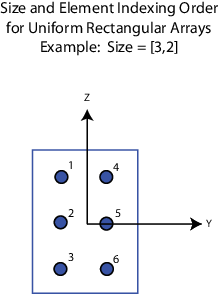
URA数组的维度,指定为正整数或正整数的1 × 2向量。
如果数组大小是一个1 × 2向量,这个向量有这个形式
[NumberOfArrayRows, NumberOfArrayColumns].如果数组大小为整数,则数组具有相同的行数和列数。
当你设置将传感器阵列指定为来
复制子数组,该参数适用于每个子数组。
对于URA,数组元素从上到下沿着最左边的列进行索引,然后从左到右继续到下一列。在这个图中,数组大小的价值(3 2)创建一个三行两列的数组。
依赖关系
若要启用该参数,请设置几何来URA所言.
矩形子数组网格大小,指定为单个正整数,或1 × 2正整数行向量。
如果网格大小是整数标量,则数组的每一行和每列中都有相等数量的子数组。如果网格大小1 × 2向量是这样的形式吗[NumberOfRows, NumberOfColumns],第一项是每列的子数组数。第二项是每行中的子数组数。一排是沿着当地y-轴,一列沿局部z设在。图中显示了如何使用数组复制3 × 2 URA子数组网格大小的[1,2].

依赖关系
若要启用该参数,请设置传感器阵列来复制子数组而且子阵布局来矩形.
版本历史
您也可以从以下列表中选择一个网站: