传感器阵列分析仪
分析线性、平面、三维和任意传感器阵列的波束图和性能特征
打开传感器阵列分析仪应用程序
MATLAB®将来发布:应用程序选项卡,在信号处理与通信,单击应用程序图标。
MATLAB命令提示符:输入
sensorArrayAnalyzer.
例子
均匀线性阵列(ULA)
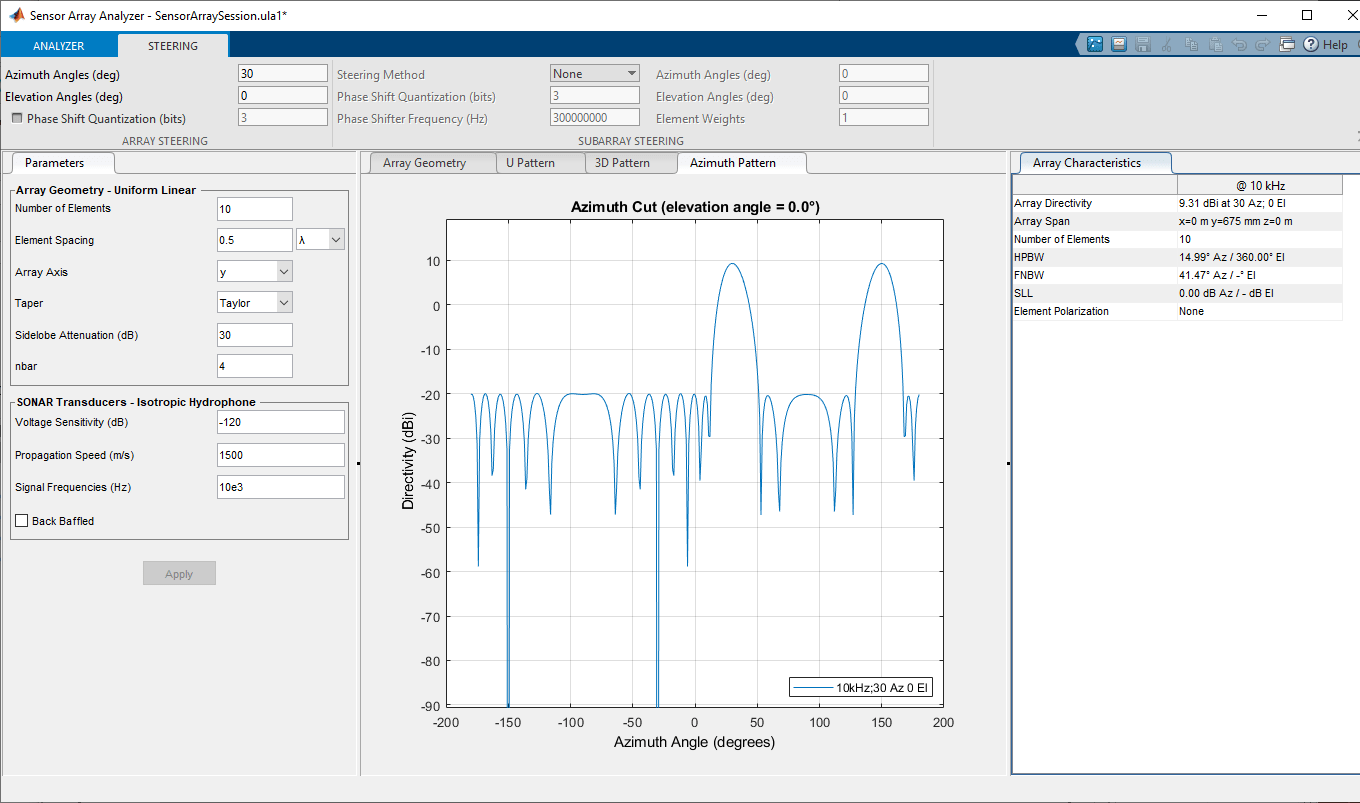
本实例分析了10元均匀线性阵列(ULA)在声纳中的应用。该阵列由各向同性水听器组成。设计阵列为10khz信号。
均匀线性阵列具有沿直线等距分布的传感器元件。
下分析仪选项卡,数组部分的工具条,选择齿龈.在元素部分的工具条,选择水听器.
选择“参数”页签并设置的元素数量来10.设置元素间距来0.5波长。
设计的阵列为一个10khz的信号设置信号频率(赫兹)来10000.然后点击应用按钮。您可以更改许多菜单项,并在任何时候应用这些更改。这个选项卡中的参数取决于您对数组和元素的选择。
当你选择声纳元件时,应用程序会自动设置信号在水中的传播速度为1500.通过设置,可以将信号传播速度设置为任意值传播速度(米/秒).
选择阵列几何选项卡,并使用复选框显示元素法线(显示法线)、元素索引(显示指数)和元素锥形(显示小蜡烛).
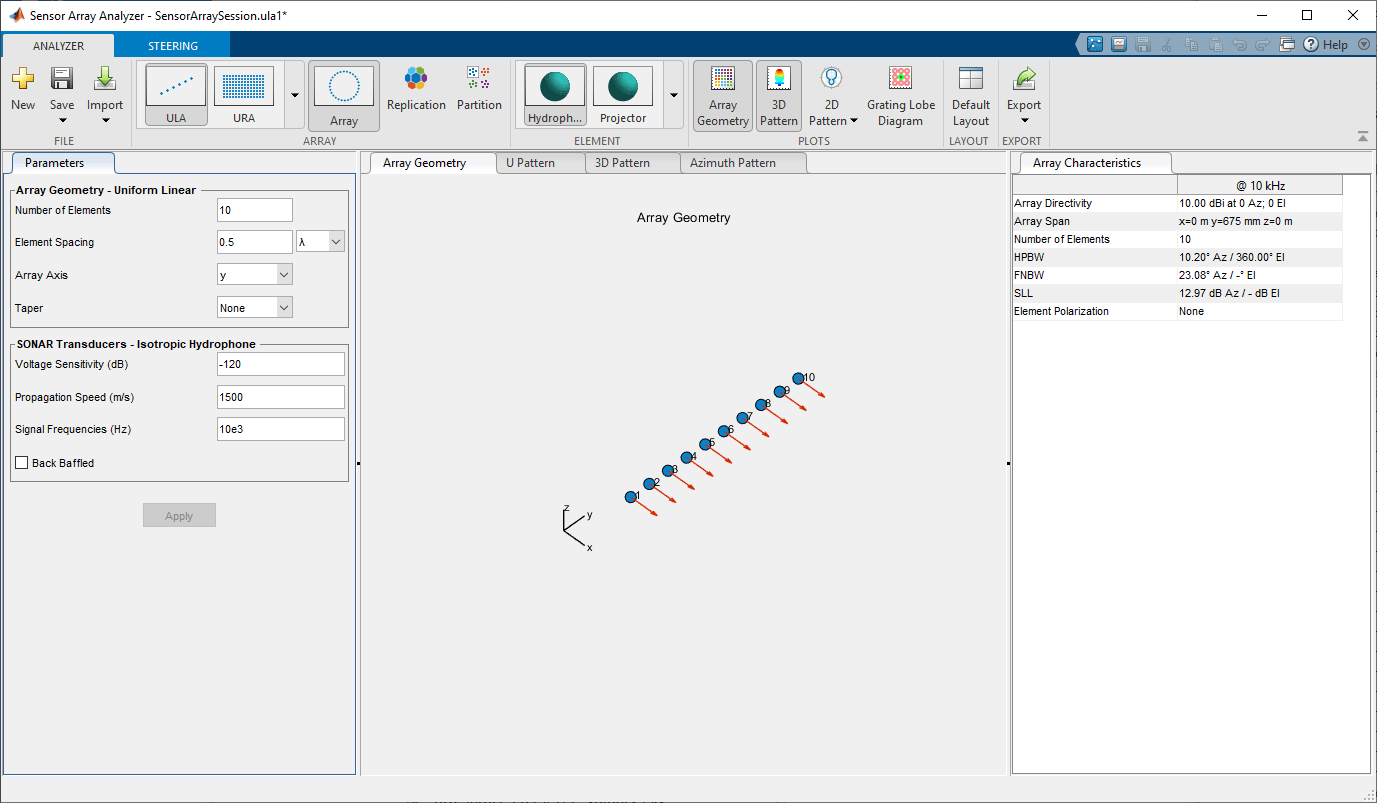
在最右边的数组的特点面板上可以查看阵列的方向性、半功率束宽(HPBW)、第一空束宽(FNBW)和旁瓣电平(SLL)。
若要显示指向性图,请转到情节部分的分析仪选项卡。选择方位模式从2 d模式菜单。方位角方向模式现在显示在应用程序的中心面板中方位模式选项卡,并设置协调来矩形.
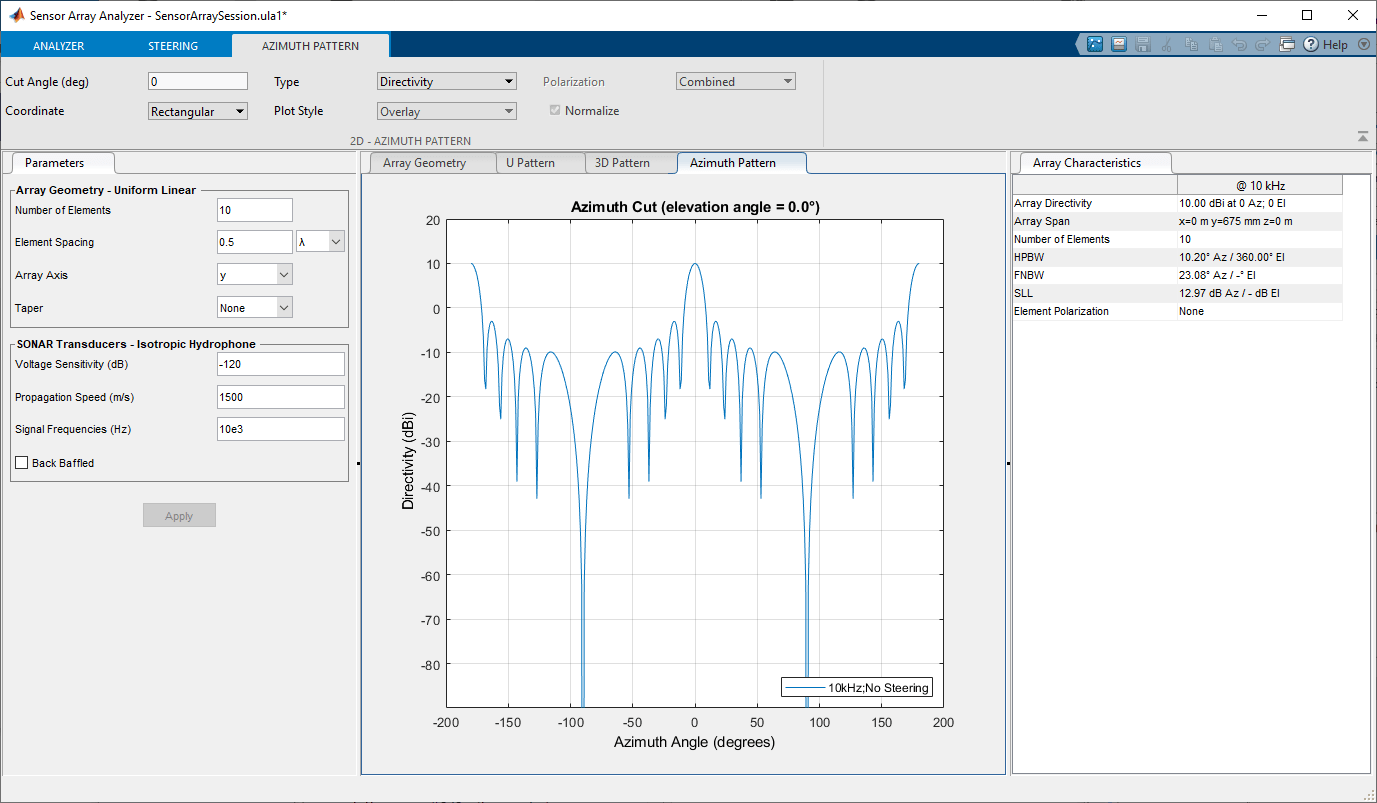
你可以看到阵列方向性函数(也称为主波束)的主瓣在0°,另一个主瓣在±180°。由于ULA阵列的圆柱形对称性,出现了两个主要的瓣。
波束扫描器的工作原理是将阵列主瓣依次指向不同的方向。在操舵选项卡,设置方位角度(度)来30.和高度角(度)来0.这将引导主瓣在方位角30°和俯仰角0°。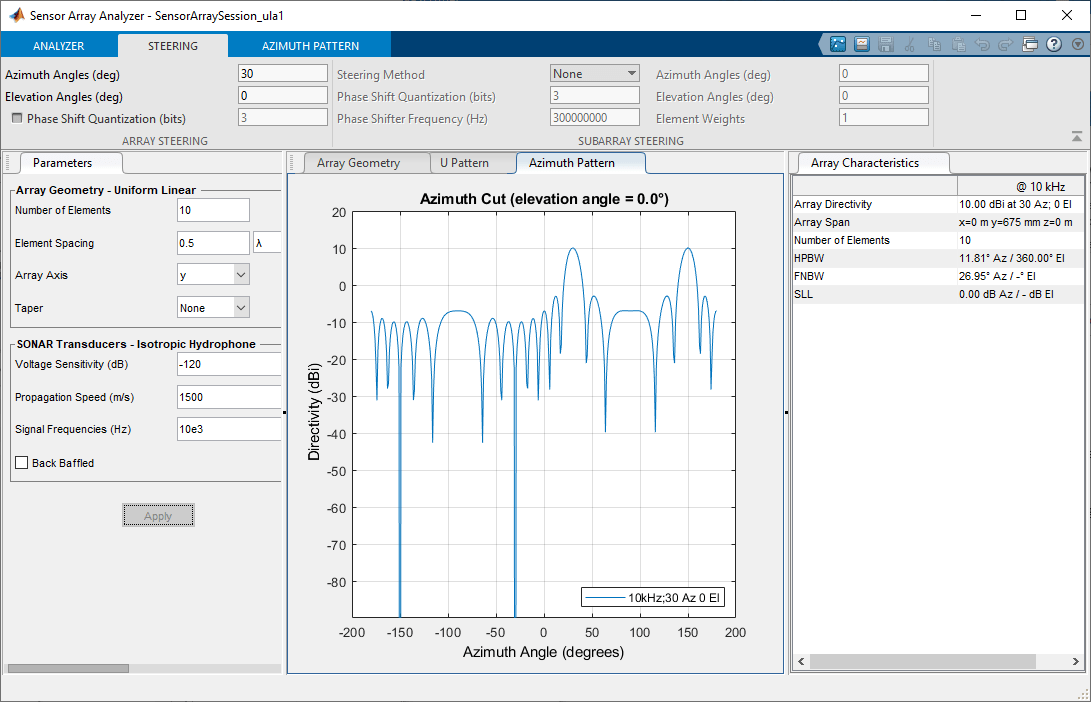
ULA的一个缺点是它的大侧叶。对阵列方向性的检查显示,在每个主瓣附近有两个旁瓣,每个旁瓣只下降约13分贝。强旁瓣抑制了阵列在附近有较大信号存在时检测较弱信号的能力。通过使用阵列渐细,可以减少旁瓣。
使用锥形选项指定数组渐变为泰勒窗口,旁瓣衰减设置为30.dB和nbar设置为4.单击应用按钮。
分区ULA的方位角响应
这个例子绘制了一个四元ULA划分为两个二元ULA的方位角响应。
下分析仪选项卡,数组部分的工具条,选择齿龈.创建一个带有默认参数的ULA(元素数量设置为4,元素间距设置为0.5米)。
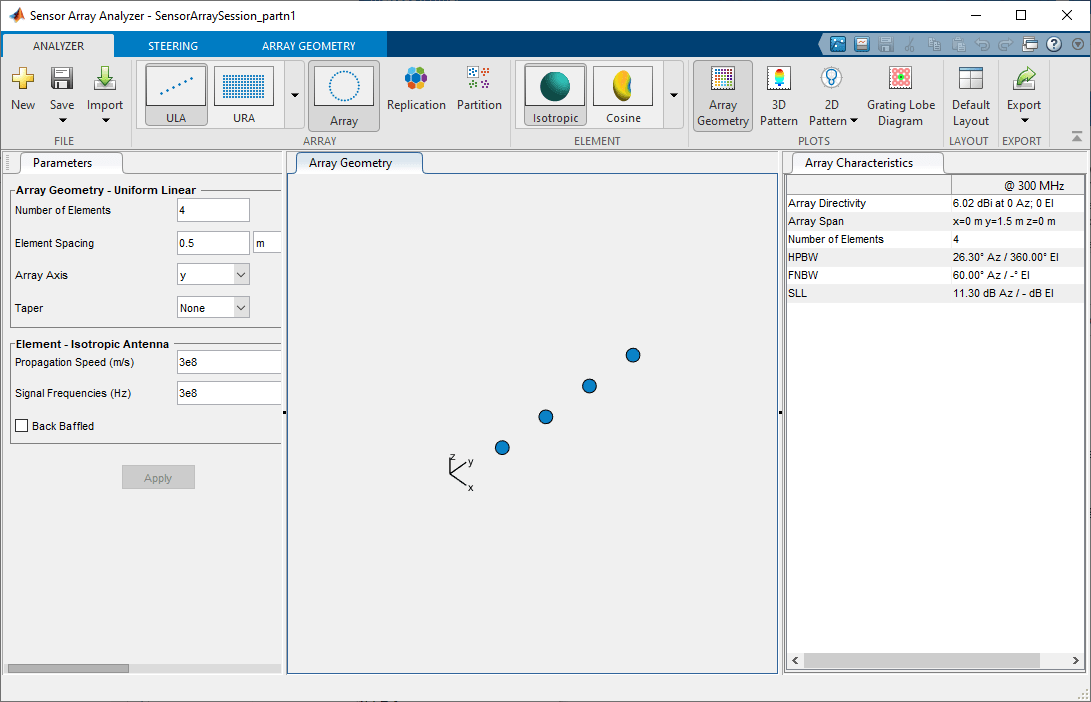
选择分区按钮分析仪.通过设置为1 GHz信号设计阵列信号频率(赫兹)来1 e9.然后点击应用按钮。您可以更改许多菜单项,并在任何时候应用这些更改。这个选项卡中的参数取决于您对数组和元素的选择。
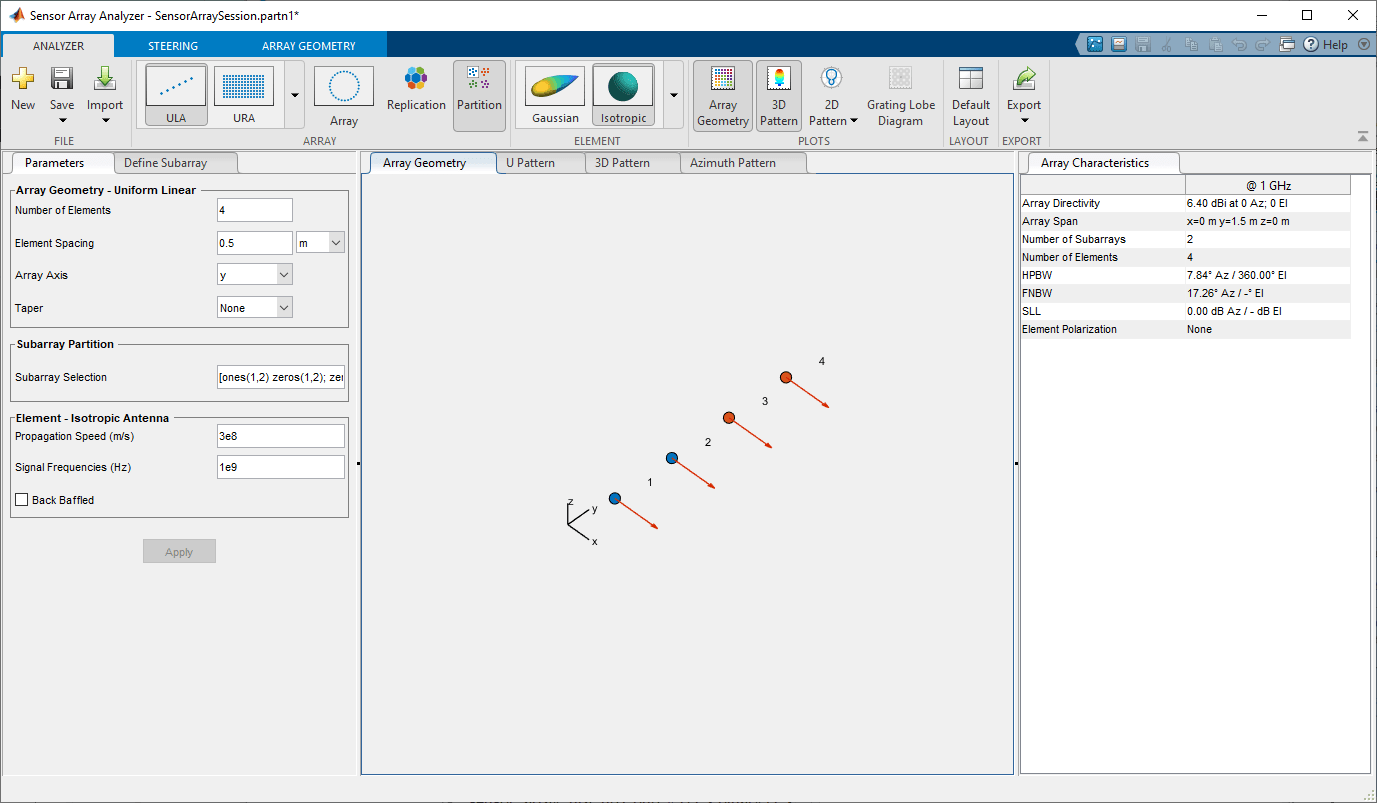
的子数组选择菜单项应该是[1(1、2)0(1、2);0(1、2)1(1、2).
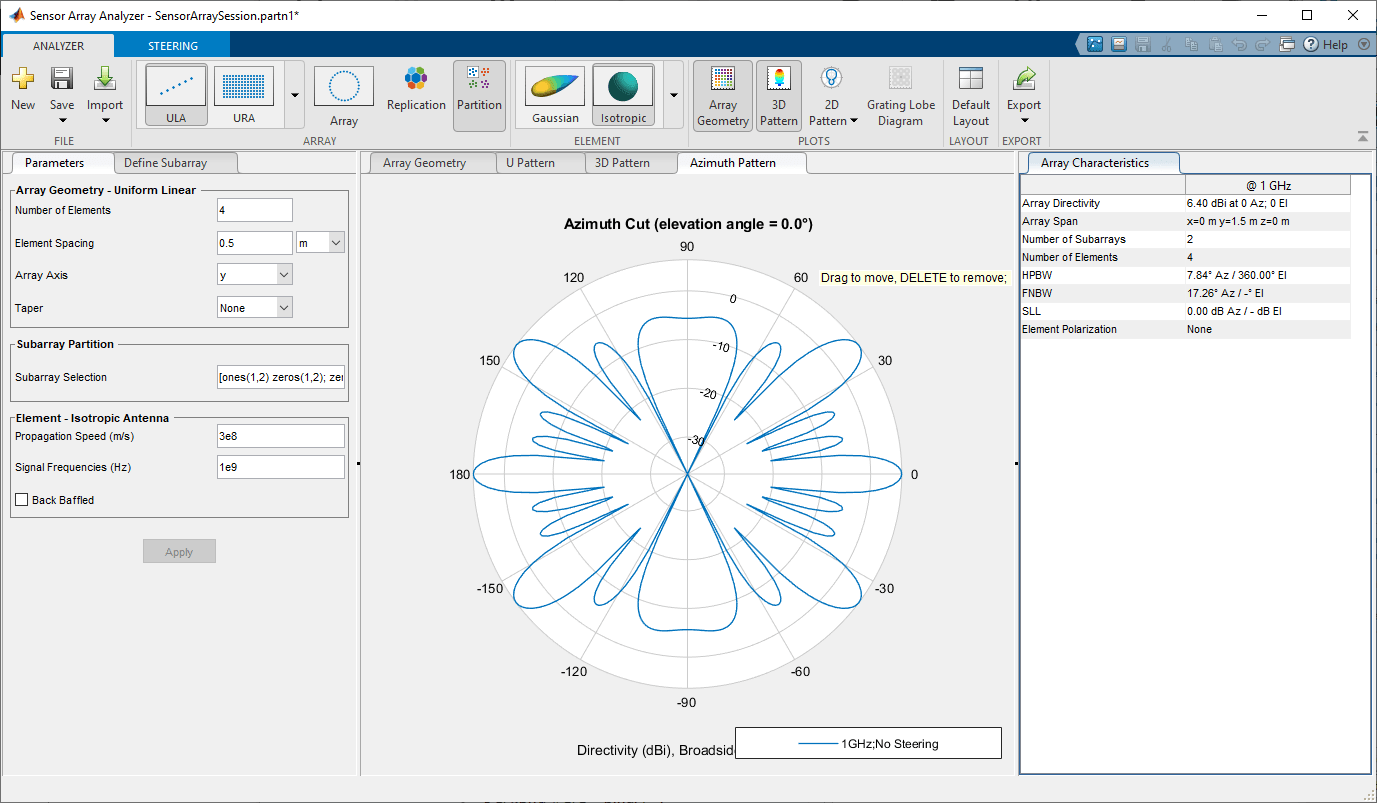
选择2 d模式在分析仪选项卡并选择方位模式在极坐标下可视化二维方位图。
Re-Partition URA所言
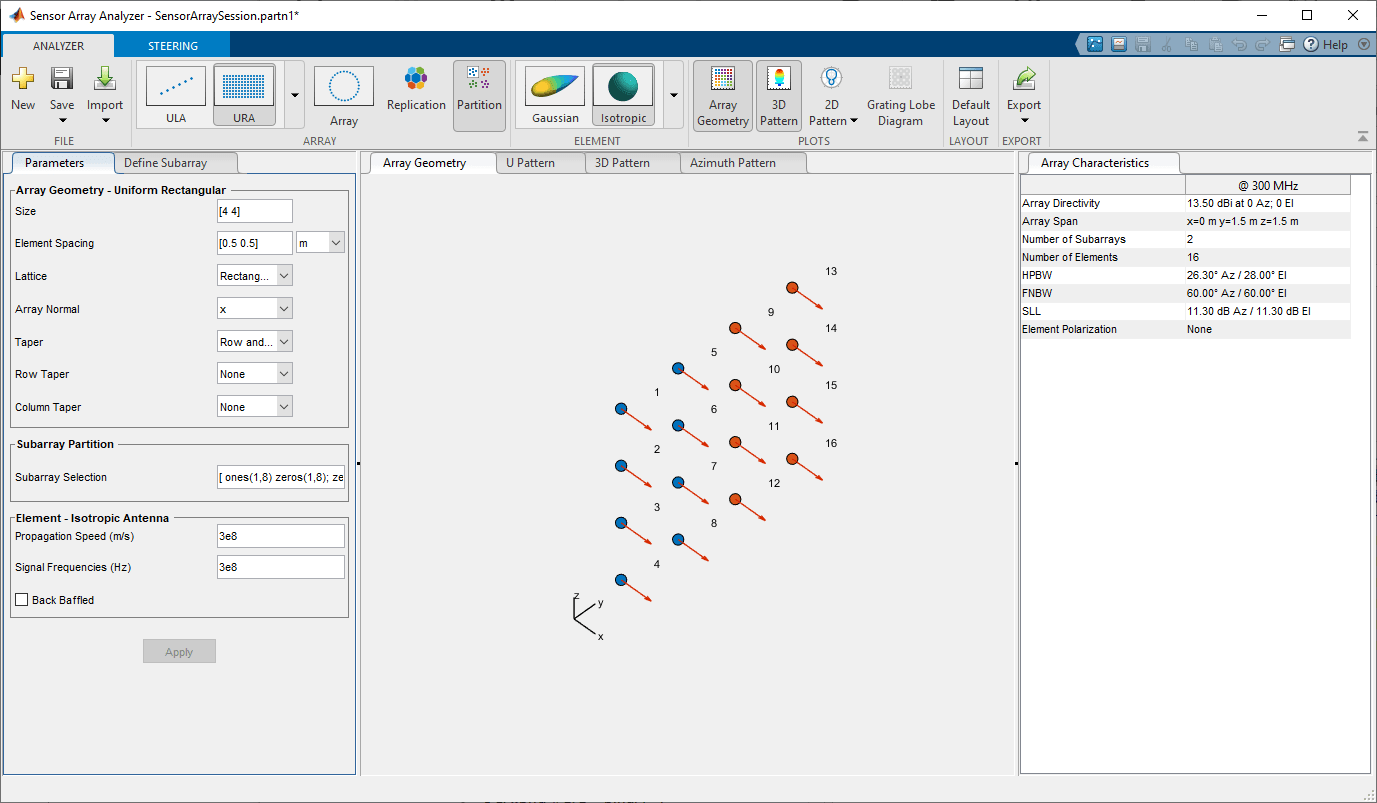
分区数组由多个子数组组成,其中每个数组元素可以分配给一个或多个子数组。创建分区数组之后,可以将元素重新分配给不同的子数组。例如,创建一个包含16个元素的4乘4的统一矩形阵列(URA)。选择分区选项卡将URA转换为一个4乘4的分区数组,其中的子数组由不同颜色表示。分区由子数组选择矩阵。
[1 (1,8) 0 (1,8);0 (1,8) 1 (8))
要重新划分数组,可以编辑子数组选择矩阵。选择定义子数组选项卡以重新排列属于子数组的元素。
选择Define Subarray选项卡将弹出子数组编辑器。
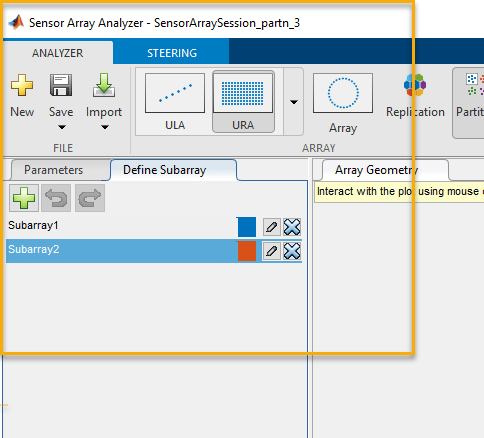
您可以:
选择Subarray1旁边的铅笔图标来编辑subarray 1中的元素和权重。
选择Subarray2旁边的铅笔图标来编辑subarray 2中的元素和权重。
选择顶部的绿色十字图标来创建一个空的子数组。
选择子数组2显示属于的元素索引子数组2.
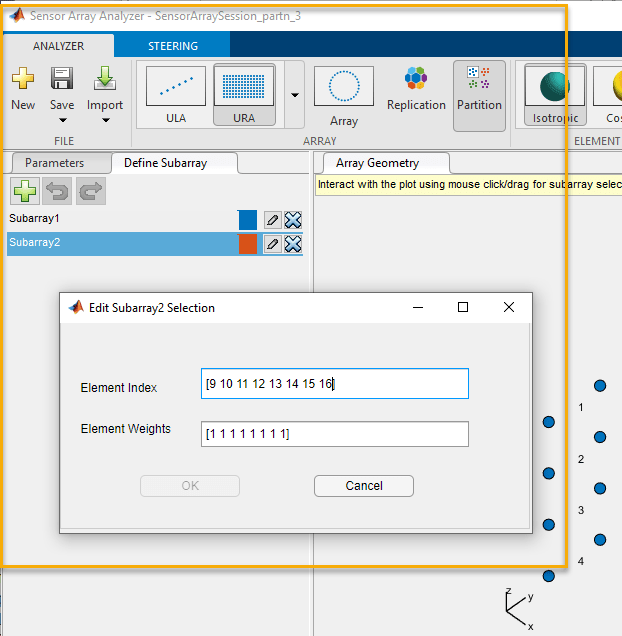
去掉元素9和它的重量。选择绿色的十字,添加一个新的子数组,子阵列3.然后将元素9添加到新的子数组。
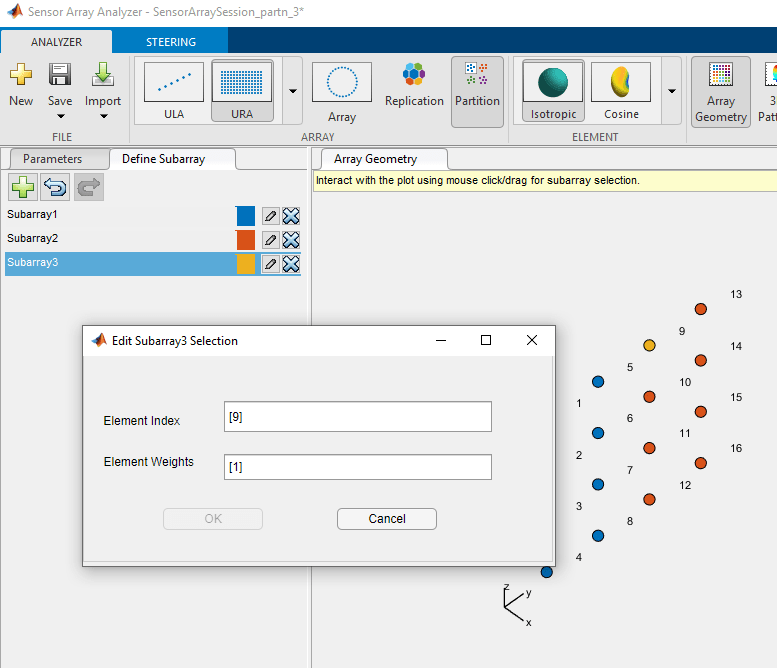
新的子数组及其添加的元素以黄色显示。
统一矩形阵(市建局)
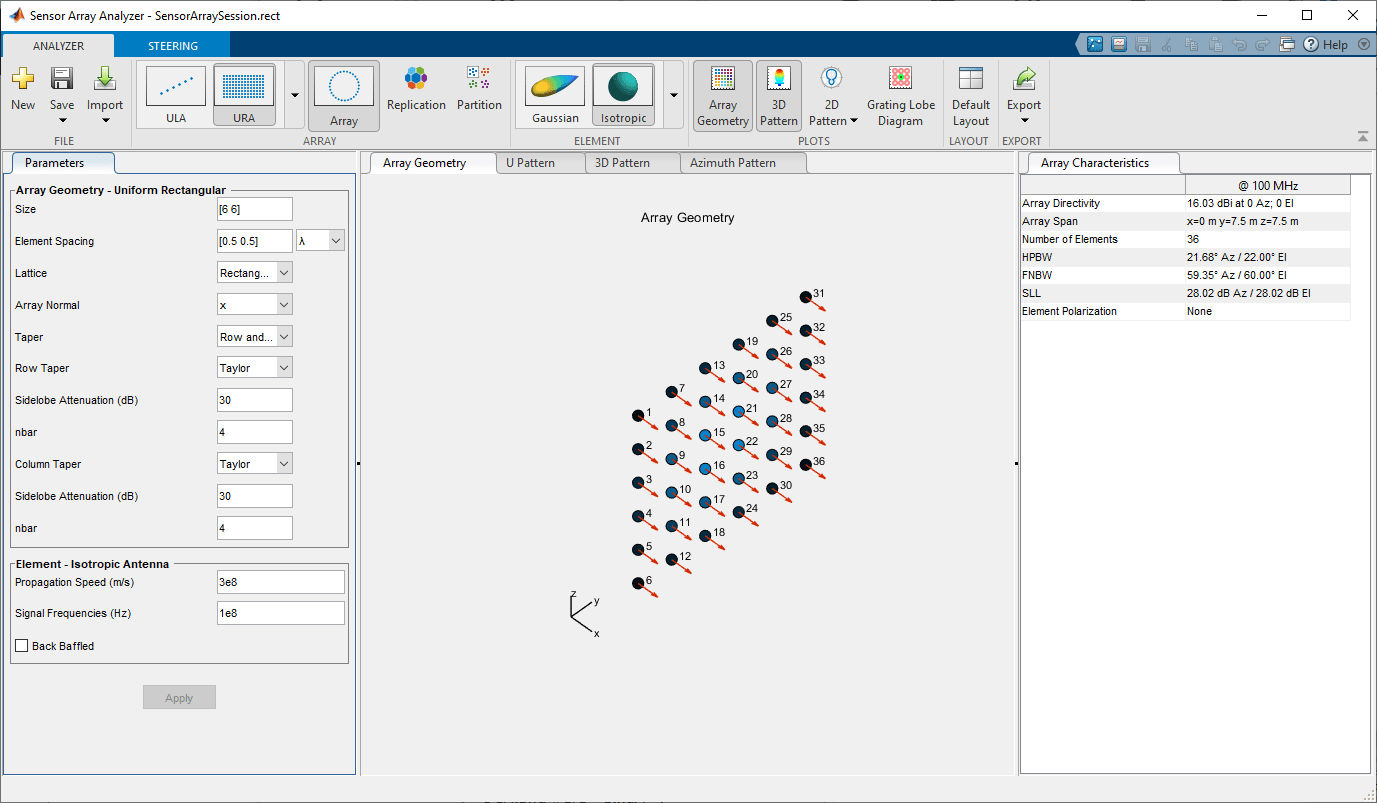
这个例子展示了如何构建一个6乘6的统一矩形阵列(URA),用于检测和定位100兆赫信号。
下分析仪选项卡,数组部分的工具条,选择URA所言.在元素部分的工具条,选择各向同性.
通过设置来设计一个100 MHz的信号阵列信号的频率来100年e6行和列元素间距来(0.5 - 0.5)波长。
选择“参数”页签并设置大小来(6,6).
从锥形下拉选择行和列.集行锥和列锥形到一个泰勒窗口使用默认的锥度参数。单击应用按钮以应用更改。您可以更改许多菜单项,并在任何时候应用这些更改。这个选项卡中的参数取决于您对数组和元素的选择。
阵列的形状如图所示。
接下来,通过选择显示一个3-D阵列模式三维模式在情节部分的分析仪选项卡。
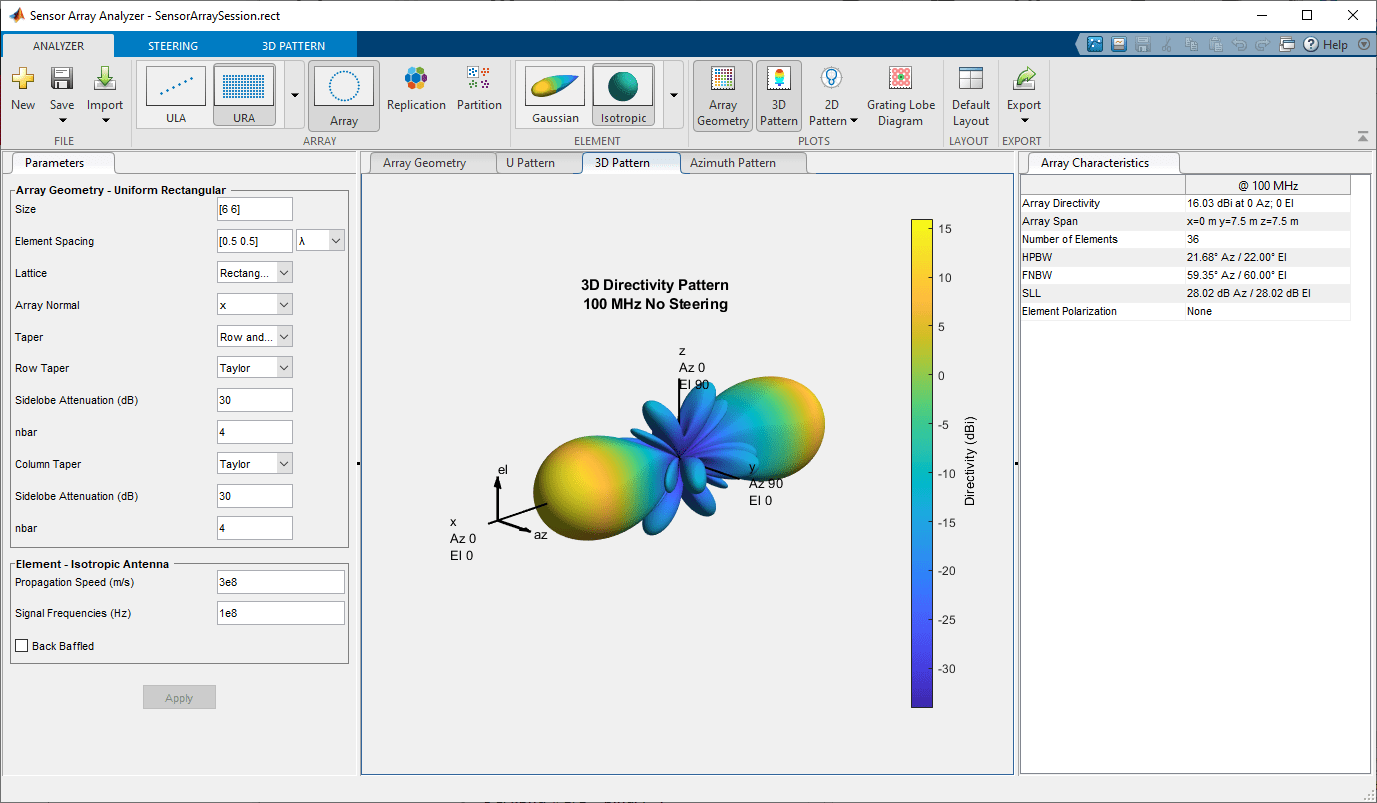
对于任何数组,一个重要的性能度量指标是方向性。你可以使用这个应用程序来检查渐变对阵列方向性的影响。如果没有锥形,这个URA的阵列方向性是17.16 dB。通过渐细,阵列方向性减小到16.03 dBi。
矩形阵列的光栅瓣
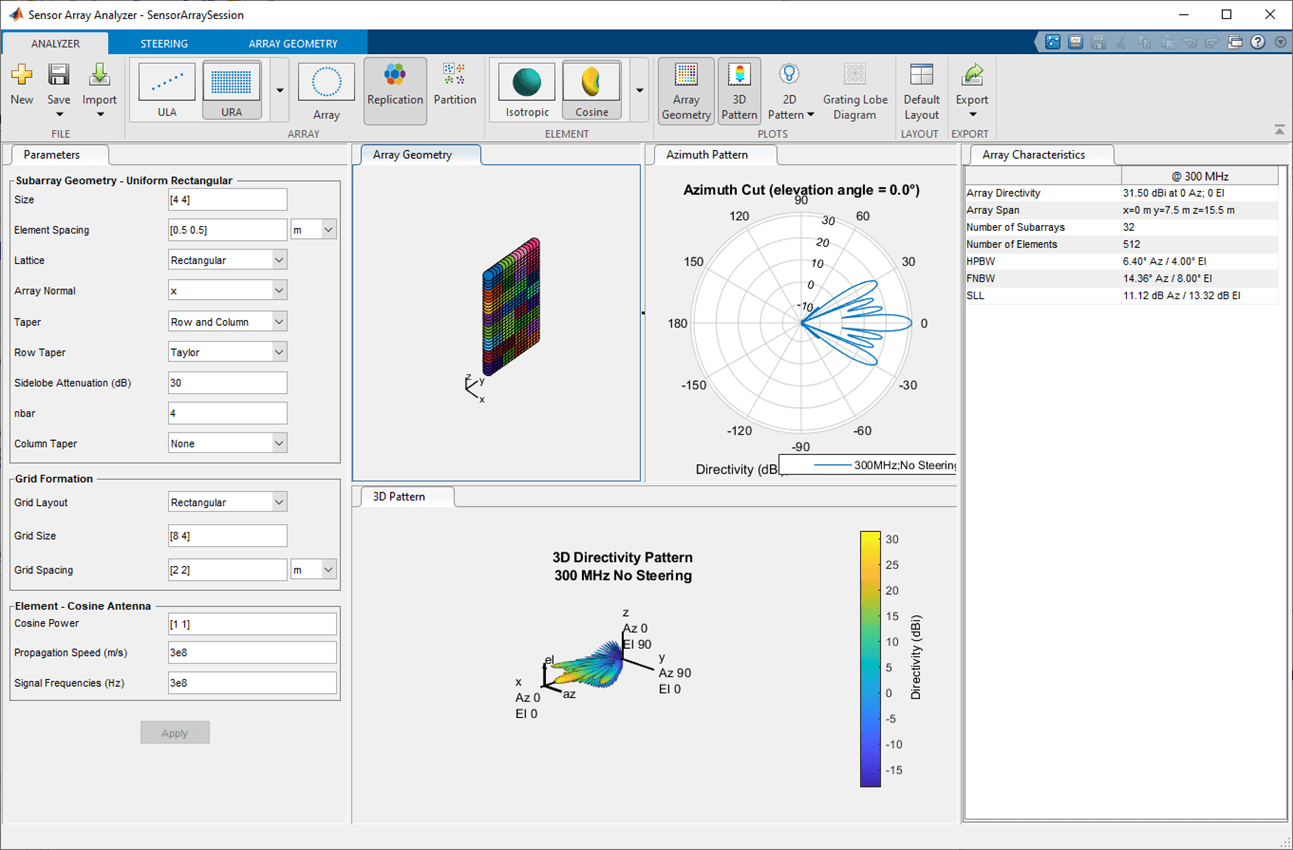
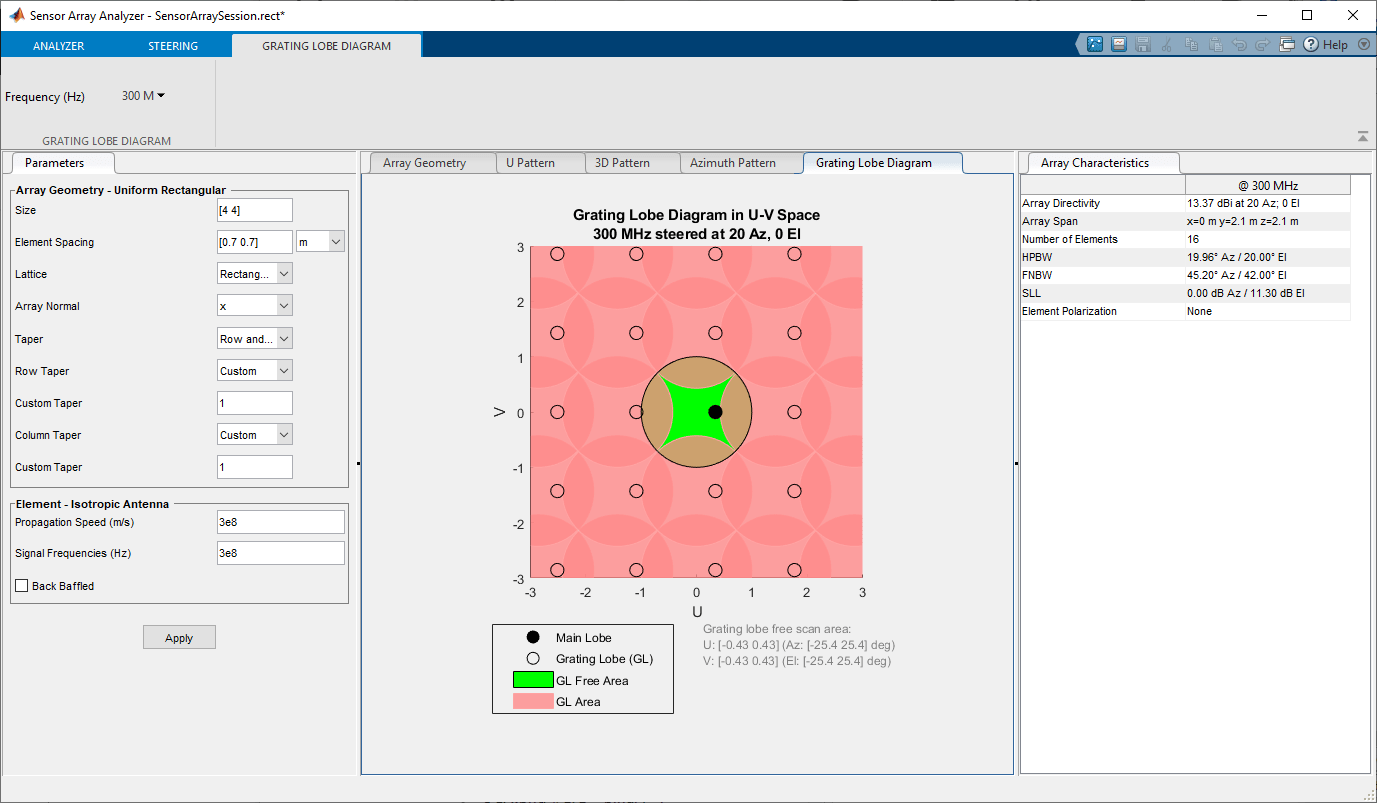
这个例子展示了用于检测和定位300mhz信号的4 × 4均匀矩形阵列(URA)的光栅波瓣图。
下分析仪选项卡,数组部分的工具条,选择URA所言.在元素部分的工具条,选择各向同性.设置大小来(4, 4).在操舵选项卡,设置方位角度(度)来20.和高度角(度)来0.
通过设置来设计一个300mhz的信号阵列信号的频率来3 e8行和列元素间距来[0.7, 0.7]波长。通过设置行和列元素间距来[0.7, 0.7]波长,你创建一个空间采样不足的数组。然后点击应用按钮。
选择栅瓣图从情节切片来绘制光栅瓣。
这张图显示了当你朝着角度[20,0]射向阵列时产生的光栅瓣图。主瓣由黑色填充的小圆表示。多个光栅瓣由未填充的小黑圆表示。较大的黑色圆圈称为物理区域u2+ v2≤1.主波瓣总是位于物理区域。光栅瓣有时位于物理区域之外。物理区域中的任何光栅波瓣都会导致入射波方向的模糊。绿色区域显示了在物理区域没有光栅瓣出现的情况下主瓣可以指向的位置。如果主波瓣被设置为指向绿色区域之外,光栅波瓣可以移动到物理区域。
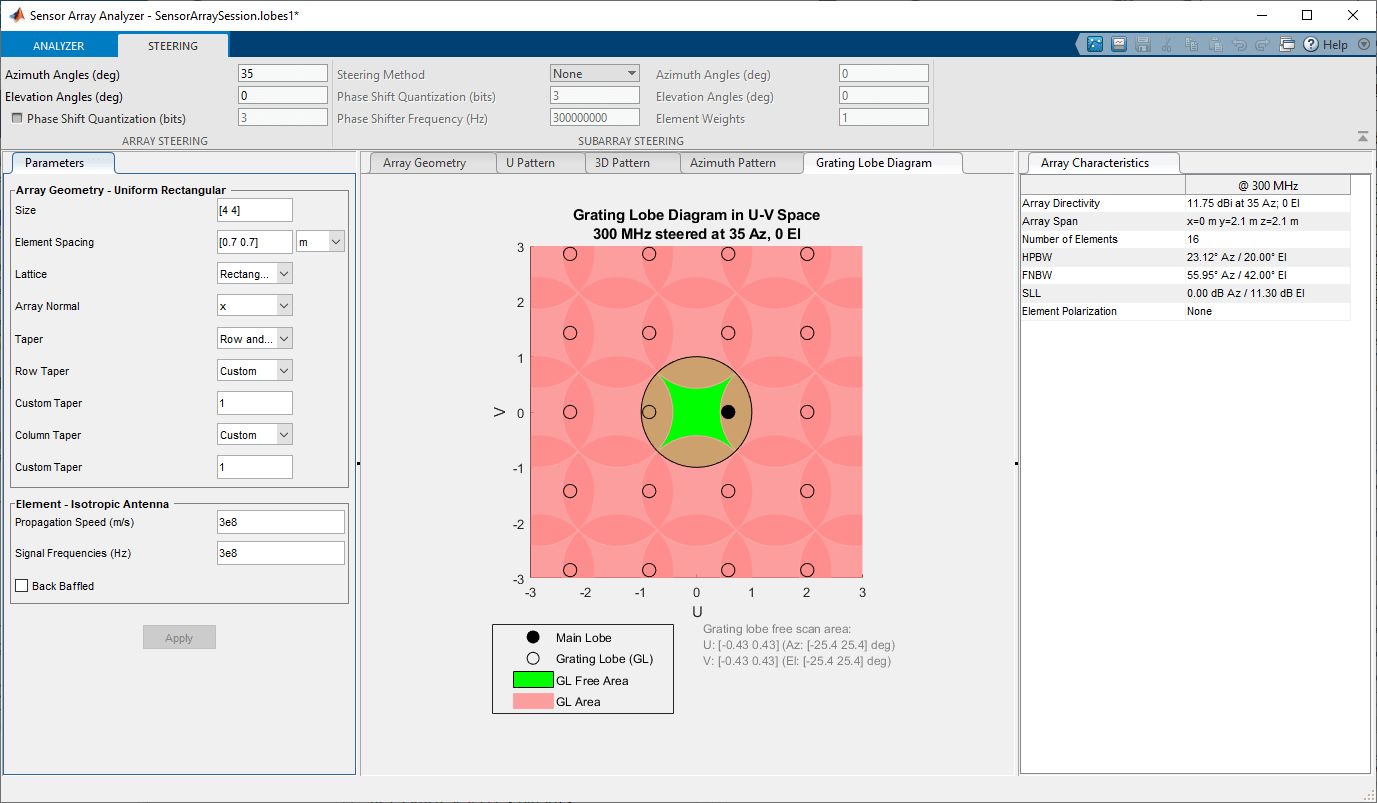
下一个图显示了当指向方向位于绿色区域外时发生了什么。在操舵选项卡,设置方位角度(度)来35和高度角(度)来0.在这种情况下,一个光栅瓣移动到物理区域。
指定任意阵列几何
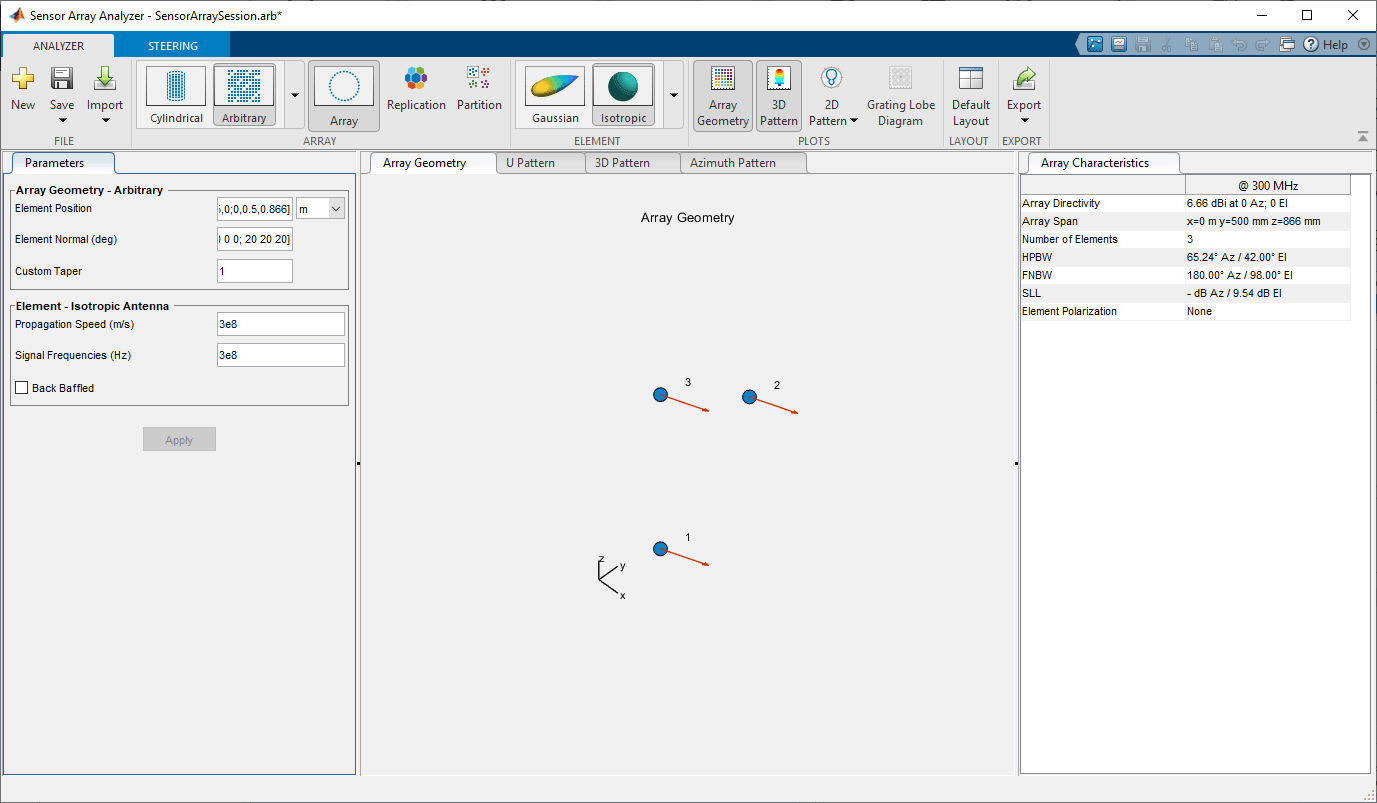
这个例子展示了如何构造一个由三个各向同性天线单元组成的三角形阵列。
您可以指定一个具有任意位置传感器的数组。选择任意的在数组下拉。选择各向同性从元素菜单。的元素位置元素的位置字段。这三个元素的位置是0.5 (0, 0, 0, 0, 0, 0, 0.5, 0.866).所有元素有相同的法线方向,指向0°方位角和20°仰角,并设置法线在元素正常(度)类型[0 0 0;20 20 20)并单击应用按钮。选择阵列几何从情节部分。
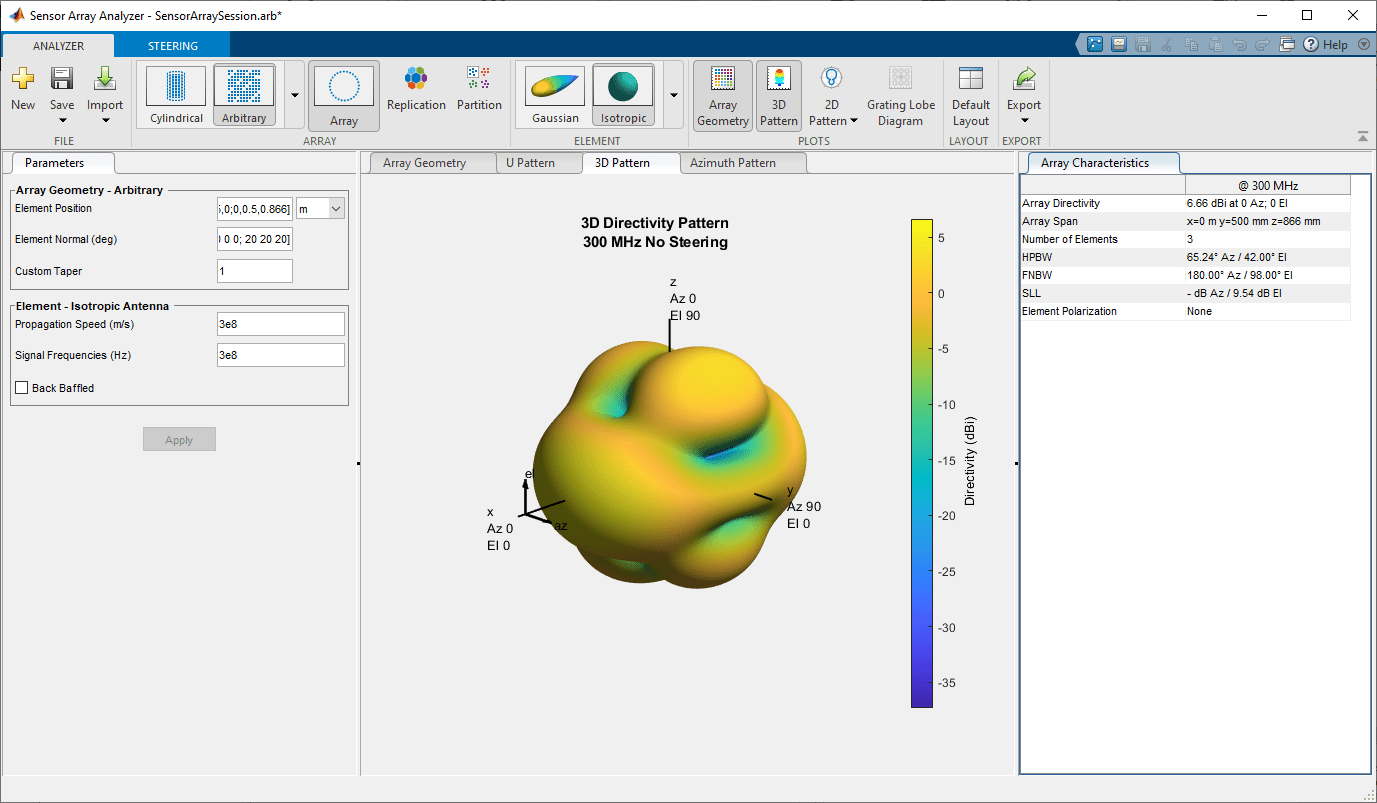
要显示三维阵列的方向性,请选择三维模式从情节选项卡。
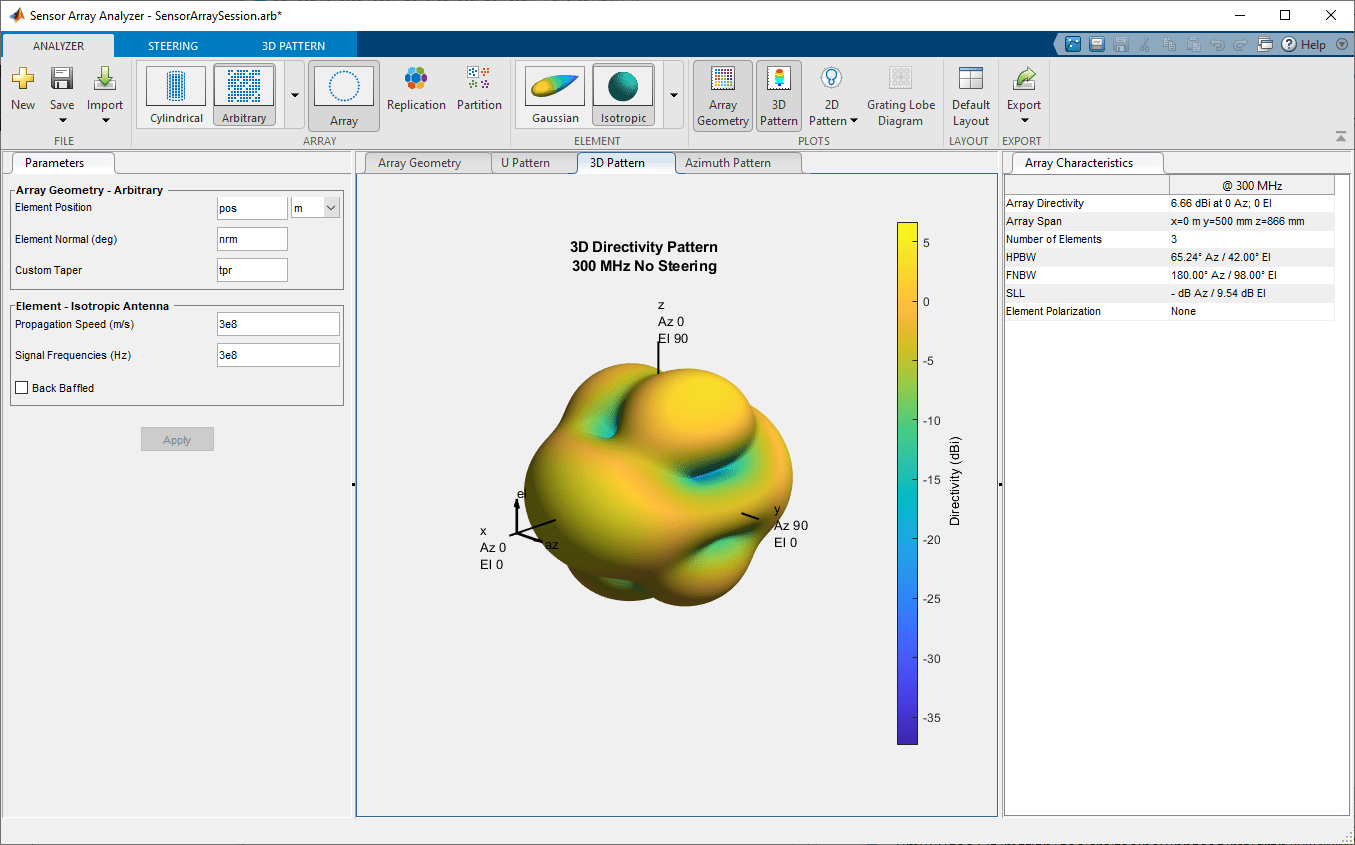
使用变量指定任意数组几何
这个例子演示了一个由在命令行设置的MATLAB变量指定的任意几何数组。在适当的地方输入变量sensorArrayAnalyzer字段。
在MATLAB命令行中,创建一个元素位置数组,pos,元素普通数组,全国抵抗运动,以及锥形值数组,tpr.
Pos = [0 0 0;0 1.0 - 0.5000;0 0 0.866];NRM = [0 0 0;20个20 20);TPR = [1 1 1];
在适当的地方输入这些变量sensorArrayAnalyzer字段后,点击应用按钮。单击,显示三维阵列的方向性三维模式从情节选项卡。
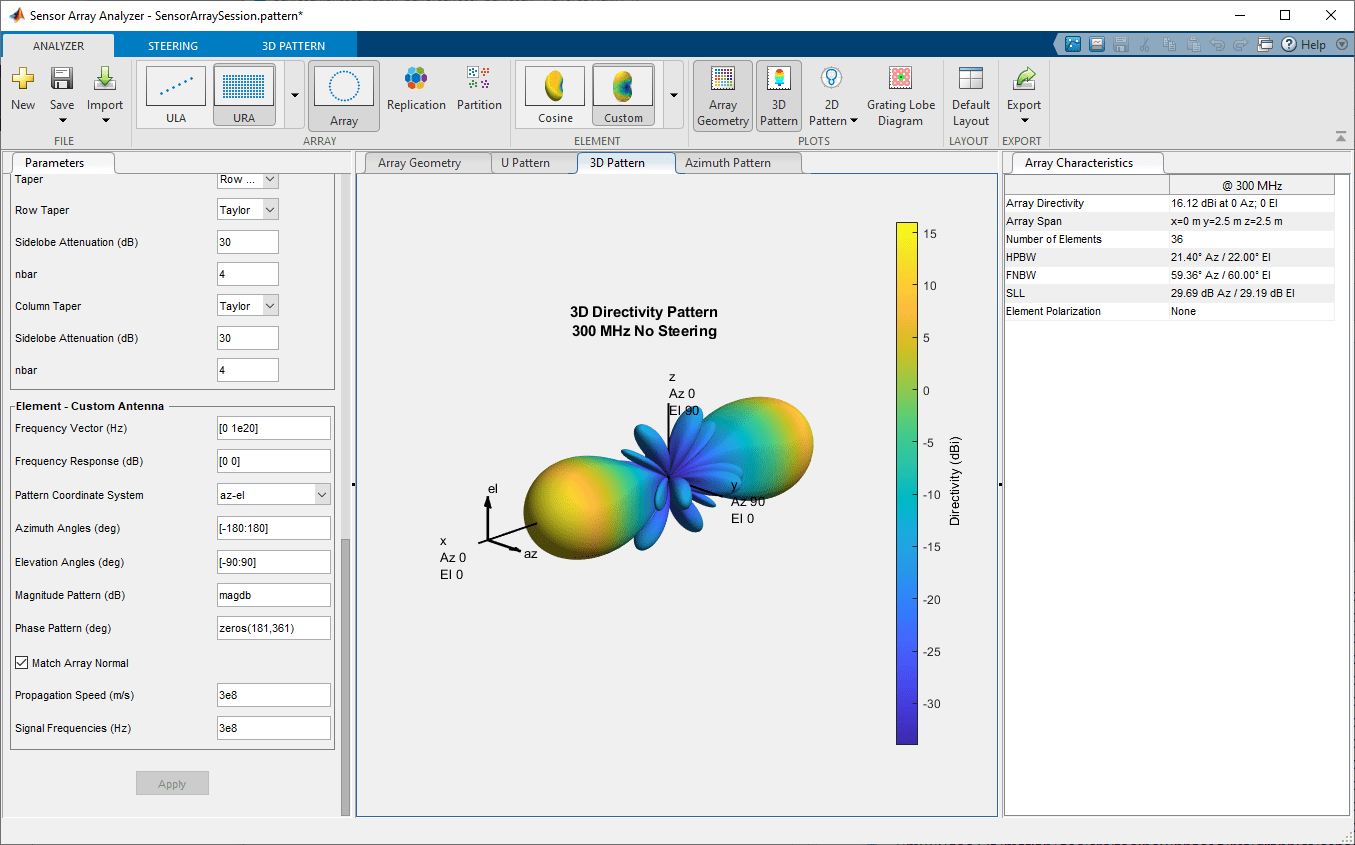
市建局自订天线元件
中使用的相同参数统一矩形阵(市建局)示例,然后单击应用按钮。在元素部分的工具条,选择自定义在天线部分。
对于定制的天线元件,指定幅度和相位图。因为模式通常需要较大的矩阵,所以最好使用命令行来指定幅度和相位模式。这里指定的幅值模式沿±方向x是方位角和仰角的函数。相位图都是零。或者,你可以通过设置角度来指定一个模式模式坐标系统参数phi-theta.
azpat = cosd([0:360])。^ 2 + 1;Elpat = cosd([-90:90]') + 1;杂志= elpat * azpat;magdb = 10 * log10 (mag);
要显示三维阵列的方向性,请选择三维模式从情节选项卡。
相关的例子
你也可以从以下列表中选择一个网站:
