用导频校准补偿阵列不确定性
此示例显示如何使用导频校准来提高天线阵列在未知扰动的情况下的性能。
介绍
原则上,人们可以容易地设计理想的均匀线性阵列(ULA),以执行阵列处理任务,例如波束形成或到达方向估计。在实践中,没有理想的阵列这样的东西。例如,阵列内的不同元素将始终存在一些不可避免的制造公差。由于一般来说,不可能获得关于这些变化的确切知识,它们通常被称为不确定性或扰动。通常观察到的不确定性包括元素增益和元素相位不确定性(电不确定性)以及元素位置不确定性(几何不确定性)。
阵列系统中存在的不确定性会导致阵列处理算法的检测、分辨率和估计性能迅速下降。因此,在部署前对阵列进行校准至关重要。除了上述因素,硬件老化和环境影响等其他因素也会导致不确定性。因此,所有部署的系统也要定期进行校准。
阵列标定算法有很多种。本例重点介绍导频校准方法[1],其中从阵列对已知位置的一个或多个已知外部源的响应来估计不确定性。算例比较了校准前后不确定性对阵列性能的影响。
建模电气和几何不确定性
考虑沿Y轴的理想6元件ULA,使用半波长间距和均匀逐渐变细。对于ULA,可以计算预期的元素位置和锥度。
n = 6;设计_pos = [零(1,n);(0:n-1)* 0.5;零(1,n)];设计_Taper = Oner(n,1);
接下来,对真实数组中可能存在的扰动进行建模。这些通常被建模为随机变量。例如,假设圆锥的大小和相位受到标准差分别为0.1和0.05的正态分布随机变量的扰动。
RNG(2014);Taper =(设计_TAPER + 0.1 * RANDN(N,1))。* EXP(1I * 0.05 * RANDN(N,1));
下图显示了摄动锥度和设计锥度的幅值和相位的差异。
helperCompareArrayProperties ('锥形',锥形,设计_ _,......{'扰动阵列'那'设计阵列'});

在x、y和z方向的传感器位置上产生的扰动类似,标准差为0.05。
pos = designed_pos + 0.05*randn(3,N);
下图显示了扰动阵列的元素位置和理想阵列的位置。
helperCompareArrayProperties ('位置',pos,designal_pos,......{'扰动阵列'那'设计阵列'});

阵列扰动的影响
前一节显示了设计,理想的阵列和真实的扰动阵列之间的差异。由于这些错误,如果盲目应用使用设计阵列计算的处理步骤,例如使用设计的阵列计算的扰动阵列,性能显着降低。
考虑LCMV波束形成器的情况,该波束形成器设计用于引导理想阵列到10°方位角方向,同时存在来自-10°方位角和60°方位角两个已知方向的两个干扰。目标是在抑制干扰的同时保留感兴趣的信号。
如果已知阵列锥度和几何形状的精确知识,则可以计算波束成形权重:
%从目标和30dB SNR中产生10K样本和干扰AZ = [-10 10 60];nsamp = 1e4;ncov = db2pow(-30);[〜,〜,rx_cov] = sensersig(pos,nsamp,az,ncov,'锥形',锥度);%计算LCMV波束形成权值,假设所设计的阵列sv = steervec (pos、az);w = lcmvweights (bsxfun (@times、锥度、sv) (0, 1, 0), rx_cov);
然而,由于阵列包含未知的扰动,因此必须基于所设计的阵列的位置和锥度来计算波束成形权重。
designed_sv = steervec (designed_pos, az);designed_w = lcmvweights (bsxfun (@times, designed_taper designed_sv),......(0, 1, 0), rx_cov);
下图比较了在扰动阵列上应用所设计的权重的模式的预期波束模式。
HelperCompareBeamPattern(POS,锥形,W,设计_W,-90:90,AZ,......{'预期模式'那'未校准的模式'},......'校准前的光束图案');

从绘制的图形中可以看出,未经校准的权重所产生的图形不满足要求。它在理想的10度方位角方向上放置一个零位。这意味着所需要的信号不能再被检索到。幸运的是,阵列校准可以帮助恢复图案的秩序。
飞行员校准
有许多算法可用于阵列校准。一类常用的算法是导频校准。该算法在已知方向上设置多个源,然后使用阵列接收来自这些发射器的信号。由于这些发射机都在已知的方向上,因此可以计算出理想阵列的预期接收信号。通过与实际接收信号的比较,可以得出由于不确定性而产生的差异,并对其进行校正。
下面的代码显示了阵列校准的过程。首先,需要在不同方向上选择试验源。请注意,导频源的数量决定了算法可以纠正多少个不确定性。在该示例中,为了纠正传感器位置的不确定性和焦点不确定性,需要至少需要四个外部源。如果使用更多来源,则估计将改善。
[-60, -5, 5,40;]- 10,0,0,30];
四个导频源位于以下方位角和仰角对:(-60,-10),(-5,0),(5,0),(40,30)。可以模拟来自这些导频的接收信号
为了m = size(pilot_ang,2): - 1:1 calib_sig(:,:m)= sensersig(pos,nsamp,pilot_ang(:,m),......ncov,'锥形',锥度);结尾
校正算法[1]利用阵列导频接收到的信号,结合所设计阵列的元素位置和锥度,估计受扰动阵列的元素位置和锥度。
[EST_POS,EST_TAPER] = PilotCalib(设计_POS,......Calib_sig,Pilot_ang,Designal_Taper);
一旦估计位置和锥度可用,可以在计算波束形成器权重时使用这些来代替设计的阵列参数。这导致由下面的红线表示的阵列模式。
corrected_w = lcmvweights (bsxfun (@times est_taper,......steervec(est_pos,az)),[0; 1; 0],rx_cov);HelperCompareBeamPattern(POS,锥形,......w,纠正_w,-90:90,az,......{'预期模式'那'校准模式'},......校准后的梁模式');
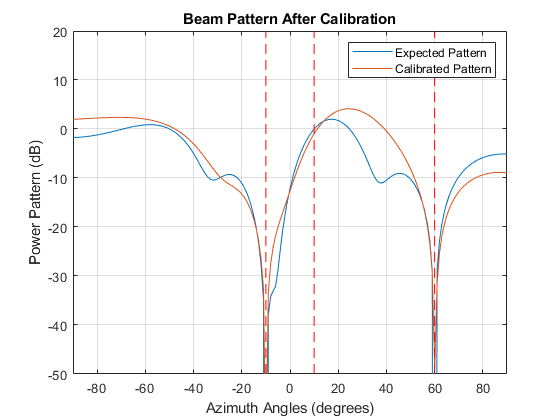
从上图可以看出,经过校准的阵列所得到的方向图比未经校准的阵列所得到的方向图要好得多。特别地,来自所需要方向的信号现在被保留了下来。
概括
此示例显示了数组的不确定性如何影响其响应模式,并反过来降低阵列的性能。该示例还示出了导频校准如何用于帮助恢复阵列性能。
参考
[1] N. Fistas和A. Manikas,“新的全局全球阵列校准方法”,IEEE ICASSP,VOL。IV,第73-76页,1994年4月。
你也可以从以下列表中选择一个网站:
