利用模糊函数进行波形分析
本例说明了如何使用模糊函数来分析波形。它比较了几种基本波形的范围和多普勒能力,例如,矩形波形和线性和阶跃调频波形。
在雷达系统中,雷达波形的选择在使系统能够在距离或速度上分离两个靠近的目标方面起着重要作用。因此,经常需要检查波形并了解其在距离和速度域的分辨率和模糊性。在雷达中,用多普勒频移测量距离,用多普勒频移测量速度。因此,距离和速度可以与延迟和多普勒互换使用。
简介
为了提高信噪比(SNR),现代雷达系统经常在接收链中使用匹配滤波器。当指定的波形用作滤波器输入时,波形的模糊函数准确地表示匹配滤波器的输出。这种精确的表示使得模糊函数成为设计和分析波形的流行工具。这种方法提供了在给定波形的延迟和多普勒域的分辨率能力的见解。基于这种分析,可以确定波形是否适合特定应用。
下面几节使用模糊函数来探讨几种流行波形的距离-多普勒关系。为了建立比较基线,假设雷达系统的设计规范要求最大明确距离为15公里,距离分辨率为1.5公里。为了简单起见,也用3e8 m/s作为光速。
Rmax = 15e3;Rres = 1500;C = 3e8;
根据前面提到的设计规范,脉冲重复频率(PRF)和波形带宽可以计算如下。
prf = c/(2*Rmax);bw = c/(2*Rres);
选择两倍于带宽的采样频率。
Fs = 2*bw;
矩形脉冲波形
雷达系统最简单的波形可能是矩形波形,有时也称为矩形波形单频波形.对于矩形波形,脉冲宽度是带宽的倒数。
矩形波形可以如下所示创建。
矩形波形=相控。RectangularWaveform (“SampleRate”fs,...脉冲重复频率的脉冲重复频率,“脉冲宽度”1 / bw)
矩形波形=相控。矩形波形与属性:SampleRate: 200000 DurationSpecification: '脉冲宽度' PulseWidth: 1.0000e-05 PRF: 10000 PRFSelectionInputPort:假频率偏移源:'属性'频率偏移:0输出格式:'脉冲' numpulse: 1 PRFOutputPort:假系数outputport:假
因为对波形的分析总是在完整的脉冲上执行,所以将OutputFormat属性保留为“脉冲”。还可以使用带宽法检查波形的带宽。
Bw_rect =带宽(矩形波形)
Bw_rect = 1.0000e+05
得到的带宽与需求匹配。现在,生成一个波形脉冲,然后使用模糊函数检查它。
Wav =矩形波形();ambgfun (wav, rectwaveform.SampleRate, rectwaveform.PRF);
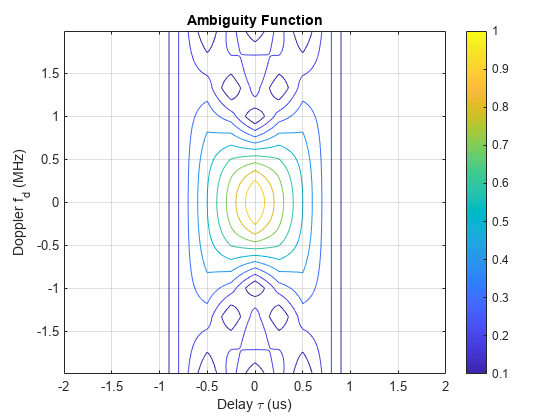
在图中,请注意非零响应仅占所有延迟的10%左右,集中在延迟0附近的狭窄地带。这是因为波形的占空比为0.1。
dc_rect =占空比(rectwaveform.PulseWidth,rectwaveform.PRF)
Dc_rect = 0.1000
在研究波形的分辨能力时,波形模糊函数的零延迟切割和零多普勒切割通常是感兴趣的。
模糊函数的零多普勒切割返回矩形波形的自相关函数(ACF)。切割可以使用以下命令绘制。
ambgfun (wav, rectwaveform.SampleRate rectwaveform.PRF,“切”,“多普勒”);
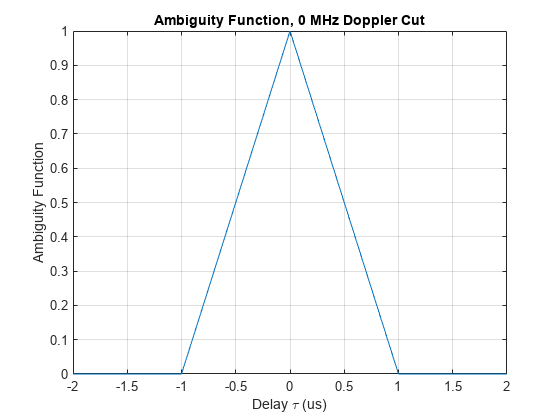
模糊函数的零多普勒切割描述了目标静止时的匹配滤波响应。从图中可以看到,第一个空响应出现在10微秒,这意味着该波形可以解析两个至少10微秒或1.5公里远的目标。因此,响应与设计规范中的要求相匹配。
零延迟切割可以使用类似的语法绘制。
ambgfun (wav, rectwaveform.SampleRate rectwaveform.PRF,“切”,“延迟”);
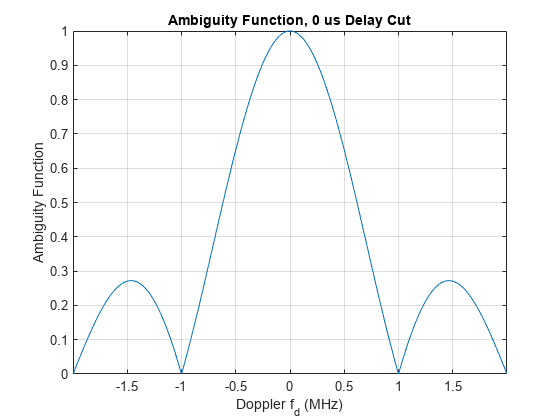
注意,返回的零延迟响应相当广泛。第一个空值直到边缘才出现,这对应于100千赫的多普勒频移。因此,如果两个目标在同一范围内,它们需要在多普勒域中有100 kHz的差异才能被分离。假设雷达工作在1 GHz,根据下面的计算,这样的分离对应30 km/s的速度差。因为这个数字是如此之大,本质上不能分离两个目标在多普勒域使用这个系统。
Fc = 1e9;Deltav_rect = dop2speed(100e3,c/fc)
Deltav_rect = 30000
在这一点上,可能有必要提到矩形波形的另一个问题。对于矩形波形,距离分辨率由脉冲宽度决定。因此,为了获得良好的距离分辨率,系统需要采用非常小的脉冲宽度。同时,系统还需要能够向空间发出足够的能量,以便能够可靠地检测到返回的回波。因此,窄脉冲宽度要求发射机的峰值功率非常高。在实践中,生产这样的电力可能非常昂贵。
线性调频脉冲波形
从上一节可以看出,单个矩形脉冲的多普勒分辨率相当差。事实上,单个矩形脉冲的多普勒分辨率由其脉冲宽度的倒数给出。回想一下,矩形波形的延迟分辨率是由它的脉冲宽度给出的。显然,矩形波形的距离和多普勒分辨率之间存在利益冲突。金宝搏官方网站
这里的根本问题是延迟和多普勒分辨率都以相反的方式依赖于脉冲宽度。因此,解决这个问题的一种方法是提出一个波形来解耦这种依赖关系。这样就可以同时提高这两个领域的分辨率。
线性调频波形就是这样一种波形。线性调频波形的距离分辨率不再取决于脉冲宽度。相反,范围分辨率由扫描带宽决定。
在线性调频波形中,由于距离分辨率现在由扫描带宽决定,系统可以提供更长的脉冲宽度。因此,降低了对功率的需求。同时,由于脉冲宽度变长,多普勒分辨率提高。即使线性调频波形的多普勒分辨率仍然由脉冲宽度的倒数给出,这种改进也会发生。
现在,详细研究线性调频波形。提供所需距离分辨率的线性调频波形可以按以下方式构造。
lfm波形=相控。LinearFMWaveform (“SampleRate”fs,...“SweepBandwidth”bw,脉冲重复频率的脉冲重复频率,“脉冲宽度”5 / bw)
lfm波形=相控。线性波形与属性:SampleRate: 200000 duration规格:“脉冲宽度”PulseWidth: 5.0000e-05 PRF: 10000 PRFSelectionInputPort:假清扫带宽:100000清扫方向:“向上”清扫间隔:“正”信封:“矩形”FrequencyOffsetSource:“属性”FrequencyOffset: 0输出格式:“脉冲”numpulse: 1 PRFOutputPort:假系数outputport:假
脉冲宽度比本例前面部分中使用的矩形波形长5倍。请注意,线性调频波形的带宽与矩形波形相同。
Bw_lfm =带宽(lfm波形)
Bw_lfm = 100000
线性调频波形的零多普勒切割出现在下一个图中。
Wav = lfm波形();ambgfun (wav, lfmwaveform.SampleRate lfmwaveform.PRF,“切”,“多普勒”);
从上图中可以看到,即使现在响应有旁瓣,第一个null仍然出现在10微秒处,因此范围分辨率保持不变。
人们也可以绘制线性调频波形的零延迟切割。观察到多普勒域的第一个零现在在20千赫左右,这是原始矩形波形的1/5。
ambgfun (wav, lfmwaveform.SampleRate lfmwaveform.PRF,“切”,“延迟”);
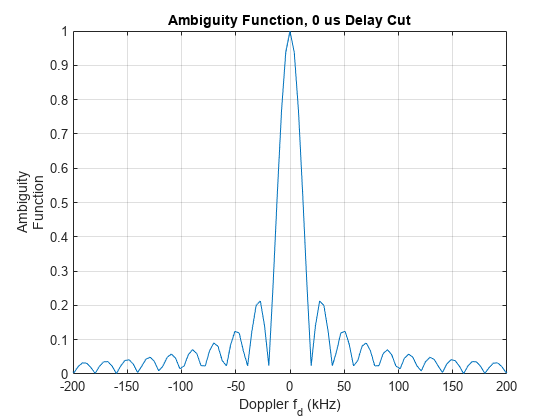
按照与本例前面部分中的矩形波形相同的程序,可以计算出20 kHz多普勒分离转换为6 km/s的速度差。这种分辨率是矩形波形的5倍。不幸的是,这种决议仍然不够。
Deltav_lfm = dop2speed(20e3,c/fc)
Deltav_lfm = 6000
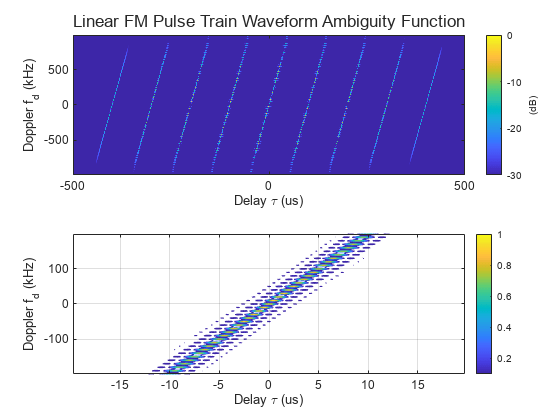
人们也可能对线性调频波形的模糊函数的三维图感兴趣。如果你想看到一个三维图形而不是等高线格式,你可以得到返回的模糊函数,然后用你喜欢的格式绘制它。例如,下面的代码段生成线性FM波形模糊函数的曲面图。
[afmag_lfm,delay_lfm,doppler_lfm] = ambgfun(wav, lfm波形。SampleRate,...lfmwaveform.PRF);冲浪(delay_lfm * 1 e6, doppler_lfm / 1 e3, afmag_lfm,“线型”,“没有”);轴紧;网格在;视图([140,35]);colorbar;包含(“延迟\tau (us)”); ylabel (多普勒f_d (kHz));标题(“线性调频脉冲波形模糊函数”);
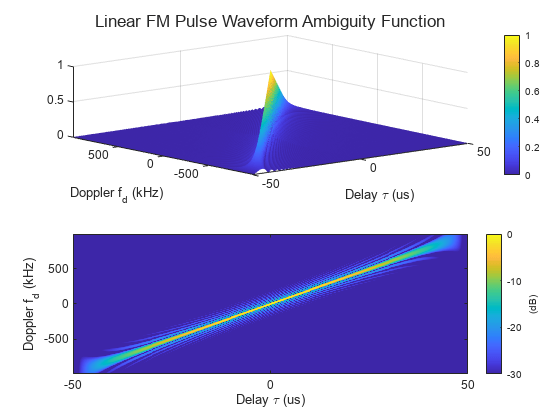
请注意,与矩形波形的模糊函数相比,线性FM波形的模糊函数略有倾斜。倾斜提供了改进的分辨率在零延迟切割。矩形波形和线性调频波形的模糊函数都具有狭长边的形状。这种模糊函数通常被称为“刀口”模糊函数。
在进一步提高多普勒分辨率之前,值得看看在波形分析中使用的一个重要的优点。脉冲宽度和波形带宽的乘积称为波形时间带宽积.对于矩形波形,时间带宽积总是1。对于线性调频波形,由于带宽与脉冲宽度的解耦,时间带宽可以大于1。刚才使用的波形的时间带宽积为5。回想一下,通过保持与矩形波形相同的距离分辨率,线性FM波形实现了5倍以上的多普勒分辨率。
相干脉冲串
在上一节中,线性调频波形的多普勒分辨率仍然相当差。提高分辨率的一种方法是进一步扩展脉冲宽度。然而,这种方法是行不通的,有两个原因:
波形的占空比已经达到50%,接近实际极限。(即使可以使用100%占空比,这仍然只是2倍的改进,这远远不能解决问题。)
较长的脉冲宽度意味着较大的最小探测范围,这也是不可取的。
如果不能在一个脉冲内扩展脉冲宽度,就必须超越这个边界。事实上,在现代雷达系统中,多普勒处理经常使用相干脉冲序列。脉冲序列中的脉冲越多,多普勒分辨率越高。
为了说明这个想法,接下来,尝试五脉冲爆发。
释放(lfmwaveform);lfmwaveform。numpulse = 5;Wav = lfm波形();
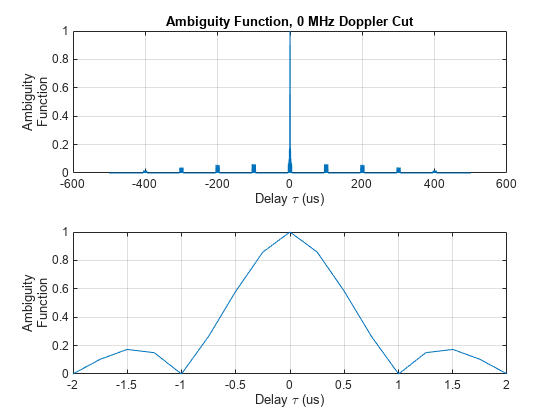
首先,绘制模糊函数的零多普勒切割图。
ambgfun (wav, lfmwaveform.SampleRate lfmwaveform.PRF,“切”,“多普勒”);
请注意,对于零多普勒切割,第一个null仍然在10微秒左右,因此距离分辨率是相同的。人们应该立即看到许多距离域旁瓣的存在。这些旁瓣是使用脉冲序列的代价。主瓣和第一副瓣之间的距离是整个脉冲的长度,即PRF的倒数。可以看到,这个值对应于最大无歧义范围。
T_max = 1/prf
T_max = 1.0000 -04
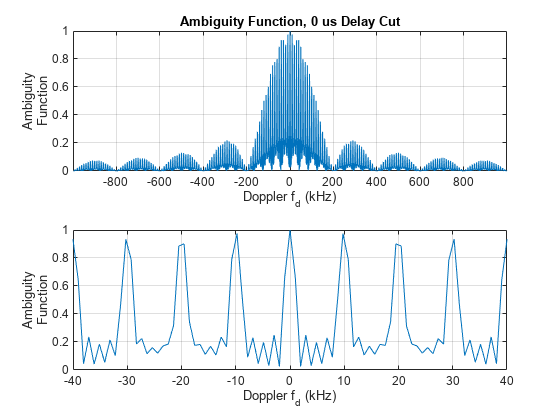
由于脉冲序列,零延迟切割也有旁瓣。主瓣和第一副瓣之间的距离是PRF。因此,这个值是雷达系统能探测到的最大无歧义多普勒值。也可以计算出相应的最大无歧义速度。
ambgfun (wav, lfmwaveform.SampleRate lfmwaveform.PRF,“切”,“延迟”);
V_max = dop2speed(lfmwave . prf,c/fc)
V_max = 3000
然而,请注意,主瓣现在更加尖锐。仔细检查显示,第一个空值大约在2千赫。这个多普勒分辨率实际上可以通过下面的方程得到,
Deltaf_train = lfm波形。脉冲重复频率/ 5
Deltaf_train = 2000
也就是说,分辨率现在由整个脉冲序列的长度决定,而不是单个脉冲的脉冲宽度。对应的速度分辨率是现在
deltaf_train = dop2speed(deltaf_train,c/fc)
Deltav_train = 600
这样就好多了。更重要的是,为了获得更好的速度分辨率,可以简单地增加脉冲序列中包含的脉冲数。当然,脉冲的数量取决于能否在整个持续时间内保持相干性,但这个讨论超出了本例的范围。
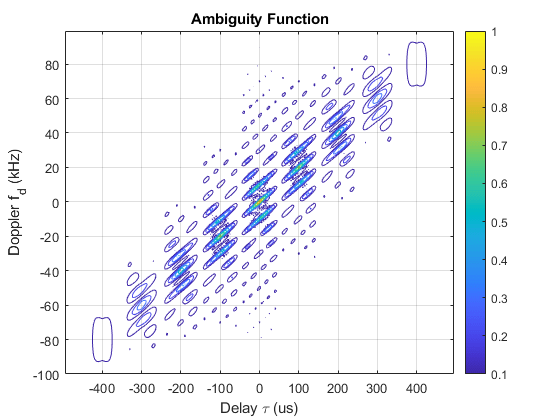
人们可能会注意到,在零延迟切割中,峰值之间的距离不再是恒定的,特别是对于较远的旁瓣。这种不稳定是因为线性调频波形的模糊函数是倾斜的。因此,判断零延迟切割中旁瓣的分离可能会产生误导。由脉冲序列引起的歧义可能最好以轮廓形式来观察,如下面的代码示例所示。注意,沿着模糊函数的边缘,这些旁瓣确实是均匀间隔的。
ambgfun (wav, lfmwaveform.SampleRate, lfmwaveform.PRF);
由于所有的旁瓣,这种模糊函数被称为钉床模糊度函数。
步进调频波形
线性调频波形在雷达系统中应用非常广泛。然而,它确实对硬件提出了一些挑战。首先,硬件必须能够在一次脉冲中扫描整个频率范围。使用这种波形也使得构建接收器变得更加困难,因为它必须适应整个带宽。
为了避免这些问题,您可以使用阶跃调频波形代替。阶梯式调频波形由多个连续连续波脉冲组成。每个脉冲都有不同的频率,所有脉冲一起占据整个带宽。因此,在脉冲内没有更多的扫描,接收机只需要容纳为单个脉冲脉冲宽度倒数的带宽。
接下来,设置这样的阶梯式调频波形。
步进波形=相控。SteppedFMWaveform (“SampleRate”fs,...“脉冲宽度”5 / bw,脉冲重复频率的脉冲重复频率,“NumSteps”5,“FrequencyStep”bw / 5,...“NumPulses”5)
步进波形=相控。steppedfmwavewavewith properties: SampleRate: 200000 DurationSpecification: 'Pulse width' PulseWidth: 5.0000e-05 PRF: 10000 PRFSelectionInputPort: false FrequencyStep: 20000 NumSteps: 5 FrequencyOffsetSource: 'Property' FrequencyOffset: 0 OutputFormat: 'Pulse ' numpulse: 5 PRFOutputPort: false系数outputport: false
Wav = stepfm波形();
模糊函数的零多普勒切割、零延迟切割和等高线图如下图所示。
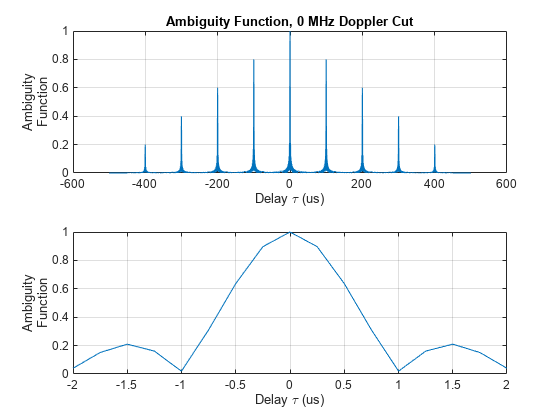
ambgfun (wav, stepfmwaveform.SampleRate stepfmwaveform.PRF,“切”,“多普勒”);
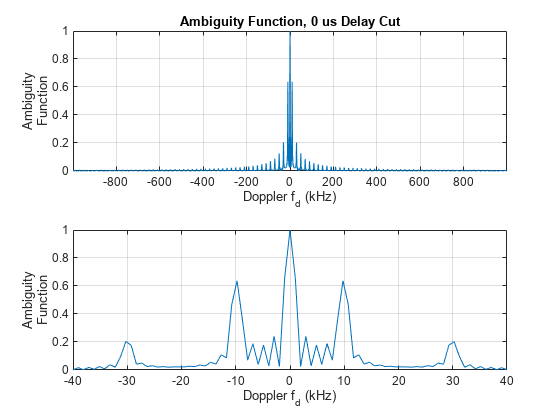
ambgfun (wav, stepfmwaveform.SampleRate stepfmwaveform.PRF,“切”,“延迟”);
ambgfun (wav, stepfmwaveform.SampleRate, stepfmwaveform.PRF);
从这些数字中,我们可以得出以下结论:
第一个空延迟仍然是10微秒,所以范围分辨率被保留。注意,因为每个脉冲都是不同的,所以距离域中的旁瓣消失了。
多普勒中的第一个空值仍然在2千赫,因此它具有与5脉冲线性FM脉冲序列相同的多普勒分辨率。在多普勒域的旁瓣仍然存在,在线性调频脉冲串的情况下。
阶梯调频波形的等高线图也是钉床型的等高线图。虽然无歧义范围大大扩展,但无歧义多普勒仍然受到波形PRF的限制。
由于阶跃调频波形的缺点,使处理变得更加复杂。
Barker-Coded波形
另一类重要的波形是相位编码波形,其中常用的有巴克码、弗兰克码和扎多夫-朱码。在相位编码波形中,一个脉冲被分为多个子脉冲,通常称为芯片,每个芯片都用给定的相位进行调制。所有相位编码波形都具有良好的自相关特性,这使它们成为脉冲压缩的良好候选者。因此,如果采用相位编码波形,随着能量分散到芯片中,它可以降低拦截概率。在接收机处,适当配置匹配滤波器可以抑制噪声并获得良好的距离分辨率。
巴克码可能是最著名的相位编码波形。可以使用以下命令构造巴克编码波形。
巴克波形=相控。PhaseCodedWaveform (“代码”,“巴克”,“NumChips”7...“SampleRate”fs,“ChipWidth”1 / bw,脉冲重复频率的脉冲重复频率)
巴克波形=相控。phasecoded波形与属性:SampleRate: 200000 Code: 'Barker' ChipWidth: 1.0000e-05 NumChips: 7 PRF: 10000 PRFSelectionInputPort: false FrequencyOffsetSource: 'Property' FrequencyOffset: 0 OutputFormat: ' pulse ' numpulse: 1 PRFOutputPort: false系数outputport: false
Wav = barker波形();
这个巴克码由7个芯片组成。给出了模糊函数的零多普勒分割
ambgfun (wav, barkerwaveform.SampleRate barkerwaveform.PRF,“切”,“多普勒”);
从图中可以看出,巴克码模糊函数的零多普勒切割有一个有趣的性质。它所有的旁瓣高度相同,并且正好是主瓣的1/7。事实上,长度为N的巴克码可以提供N的峰对峰抑制,这有助于区分距离较近的目标。这是巴克法则最重要的性质。距离分辨率约为10微秒,与芯片宽度相同。
与巴克代码相关的有两个问题。首先,已知的巴克密码只有7种。它们的长度是2,3,4,5,7,11和13。人们相信没有其他的巴克密码。其次,巴克码的多普勒性能相当差。虽然模糊函数在零多普勒切割处具有良好的形状,但一旦出现一定的多普勒频移,旁瓣电平就会显著增加。增加可以在下面的等高线图中看到。
ambgfun (wav, barkerwaveform.SampleRate, barkerwaveform.PRF);

总结
本例比较了几种流行的波形,包括矩形波形、线性调频波形、步进调频波形和巴克编码波形。还介绍了如何使用模糊函数来分析这些波形并确定它们的分辨率。
参考
Nadav Levanon和Eli Mozeson,雷达信号,威利- ieee出版社,2004年。
Mark Richards,雷达信号处理基础,麦格劳希尔,2005年。
您也可以从以下列表中选择一个网站: