不平衡负载
载有角度依赖性旋转惯性
图书馆
Simscape /传动系统/惯性与负载

描述
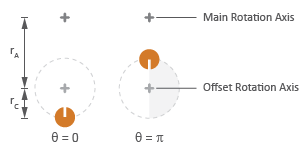
该模块模拟了转动惯量随转动角度瞬时变化的负载的影响。例子包括旋转轴的摆动和偏心旋转机器的摆动。您可以根据其旋转路径或角度-惯性查找表指定负载惯性。
该块提供了两个旋转路径参数化。一个假设不平衡负载的圆周运动。另一个假设椭圆运动。在每种情况下,不平衡负载和主旋转轴之间的距离随旋转角度而变化。不同距离导致由平行轴定理给出的惯性矩,在旋转期间变化:
在哪里:
一世是主旋转轴的惯性矩。
一世0.是关于不平衡负荷的固有旋转轴的惯性矩。
m是不平衡负荷的总质量。
R.是不平衡负载和主旋转轴之间的距离。
惯性矩的角度依赖性导致作用于不平衡负载的惯性力矩的角度依赖性:
在哪里:
T.一世是惯性扭矩。
ω为载荷的角速度。
如果载荷沿圆周路径移动,则其到主旋转轴的距离为
在哪里:
R.一种是主旋转轴和偏移旋转轴之间的距离。
R.C是圆形路径的半径。
圆形旋转路径
如果载荷沿椭圆路径移动,则其到主旋转轴的距离为
在哪里:
R.∥为椭圆路径与主旋转轴距离一致的半径。
R.⊥为椭圆路径垂直于主旋转轴距离的半径。
椭圆形旋转路径

港口
该区块有一个保存旋转端口。这个端口在传动系统模型中识别不平衡负载的位置。
参数
惯性
- 参数化
-
不平衡负载惯性矩的参数化选择。选项包括
圆形的旋转那椭圆旋转,通过表查找.默认设置为圆形的旋转.选择
圆形的旋转或椭圆旋转根据负载旋转路径参数化负载惯量。选择通过表查找通过其旋转路径直接提供负载惯性。 - 关于自己轴的惯性矩
-
关于不平衡负荷的内在旋转轴的惯性矩。在整个仿真中假设惯性时刻恒定。此参数仅显示参数化被设置为
圆形的旋转.默认值是1kg * m2。 - 大量的
-
不平衡负载的质量。此参数仅显示参数化被设置为
圆形的旋转.默认值是1公斤。 - 从轴到旋转中心的距离
-
主旋转轴与旋转路径中心之间的距离。此参数仅显示参数化被设置为
圆形的旋转.默认值是0.01m。 - 旋转半径
-
圆形旋转路径的半径被不平衡负载遍历。此参数仅显示参数化被设置为
圆形的旋转.默认值是0.01m。 - 旋转半径轴线距离轴线
-
由不平衡负载遍历的椭圆旋转路径的半约轴长度。半约轴符合连接主旋转轴和椭圆旋转中心的线段。此参数仅显示参数化被设置为
椭圆旋转.默认值是0.01m。 - 垂直于离轴距离的旋转半径
-
椭圆旋转路径的半体轴的长度被不平衡负载遍历。半轴轴垂直于连接主旋转轴和椭圆形旋转中心的线段。此参数仅显示参数化被设置为
椭圆旋转。默认值为0.005m。 - 角矢量
-
指定负载惯性的角位置阵列。该块计算使用线性插值指定的角度之间的负载惯量。此参数仅显示参数化被设置为
通过表查找.默认向量是[0,π,3 *π/ 2)rad。 - 惯性矢量
-
负载惯性阵列围绕负载的固有旋转轴。每个惯性对应于指定的角度角矢量范围。此参数仅显示参数化被设置为
通过表查找.默认向量是(1、10、1)kg * m ^ 2。
初始条件
- 初始化
-
参数选择通过其指定不平衡负载的初始状态。选项包括
指定的角动量和指定角速度. - 初始角动量
-
仿真开始时不平衡负载的角动量。此参数仅显示初始化参数设置为
指定的角动量.默认值是0.m ^ 2 * kg / s。 - 初始角速度
-
仿真开始时不平衡负荷的角速度。此参数仅显示初始化参数设置为
指定角速度.默认值是0.rad / s。 - 初始角度
-
在仿真开始时不平衡负载的角度位置。初始角度确定不平衡负载的初始惯性。默认值是
0.rad。
扩展能力
你也可以从以下列表中选择一个网站: