无刷直流电动机
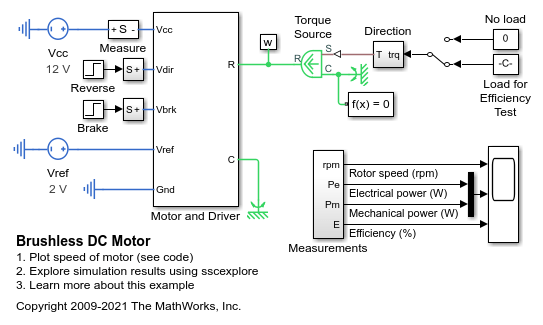
此示例显示了无刷直流电动机(即伺服电机)的系统级模型如何基于数据表信息来构建和参数化。电机和驱动器被建模为单个蒙版子系统。如果在Simulink®中查看模型,请选择电机和金宝app驱动程序块,然后键入Ctrl + U以查看掩码并查看模型结构。
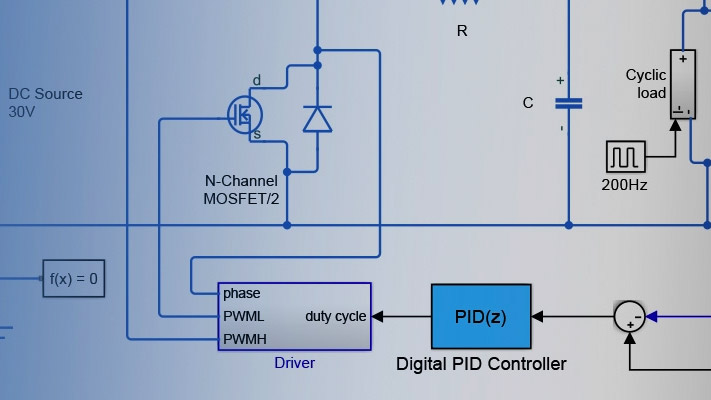
无刷直流电机的这种模型使用标准配置。内部反馈回路控制电流和外部反馈回路控制电机速度。通过在VREF引脚上呈现的电压设定速度需求,并通过VDIR引脚所呈现的电压来设定电动机方向。如果VBRK引脚处的电压高,则覆盖VREF并升温设置为零以实现制动动作。
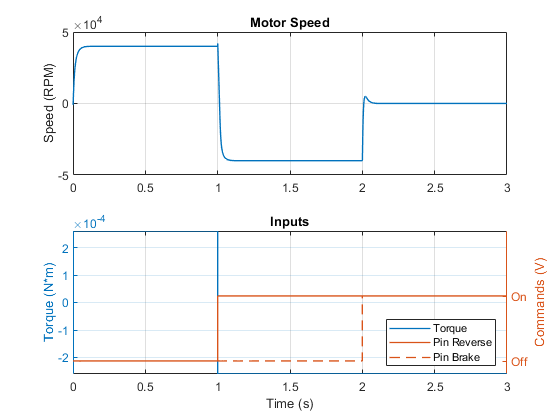
在该模型中,速度需求设置为2V,其对应于40,000rpm。在一秒钟之后,VDIR引脚设定为高,电机向-40,000RPM反转。在2秒时,制动销VBRK设置为高,电机减速至零RPM。无刷DC电动机的效率计算为机械电源与电力的比率。因此,由于转子惯量,它可以在0到100%范围内瞬时出现。
无刷直流电机的制造商数据表使失速扭矩为0.44mnm,最大允许速度为100,000rpm,机械时间常数为5ms,转子惯量为0.005gcm ^ 2,效率为0.23mnm和40,000 0050,000rpm,没有-12MA和标称电压为12V的电流。时间常数是基于使用使用块换向的制造商电机驱动器。可以配置电机驱动器,使得当速度参考电压最大+ 5V时,命令速度为100,000rpm。
电机和驱动器子系统中的伺服电动机块用于模拟内部电流反馈回路,以及平衡机械和电力。对于系统设计,通常不需要模拟电动机驱动器控制的电流切换,而确保从直流电源汲取的正确扭矩速度特性和电流是。最大扭矩值的矢量在实践中由最大驱动器电流确定。电机驱动器通常具有最大电流设置,应与最大额定电机扭矩匹配,或者如果电机过度指定,则要将其施加到负载的最大扭矩。这里,最大扭矩值的矢量设定为高达和超过100,000rpm的最大速度的电机失速扭矩。假设是使用电动机和驱动器的系统将注意确保电机在高扭矩和速度组合时运行太长而不会过热。
假设电动机电损耗包括两个术语。首先是一个独立于负载的固定损耗,这是计算为VCC * I0,其中VCC是标称电源电压,I0是从驾驶电源汲取的空载直流电流。注意,如果使用块换向,则对于驱动器,该示例基于,I0将是通电相绕组中的电流的两倍。第二损耗术语与瞬时电动机绕组电流的平方成比例。这可以近似为与平均扭矩平方成比例的术语。两个损耗术语由伺服电机块实施。
有三个电机和驱动程序掩模参数必须调整以匹配数据表值。这些是速度反馈控制器的比例和积分增益,以及内环电流控制器的时间常数。在这里,数据表将无负载时间常常提供为5ms。典型的拇指规则是内部控制环路应比外环快至少十倍。这意味着当前控制器的0.5ms的时间常数。利用该值集,然后增加比例项直到速度时间常数约为5ms。然后,当在负载下执行速度步骤时应设置积分增益,并且增加直到5ms的顺序除去稳态误差。然后需要两种收益的一些微调来恢复无负载下的5ms上升时间。
模型
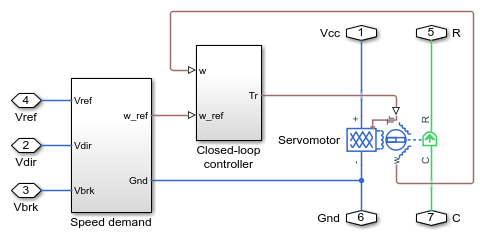
电机和驱动器子系统
Simscape Logging的仿真结果
下图显示了无刷直流电动机在不同条件下的速度。负载扭矩是恒定值,总是与轴的旋转相反。应用反向和制动的命令。
您还可以从以下列表中选择一个网站: