基于空间矢量调制的异步电机直接转矩控制
这个例子演示了使用空间矢量调制的直接转矩控制(DTC)技术的变频交流驱动器的速度调节。

描述
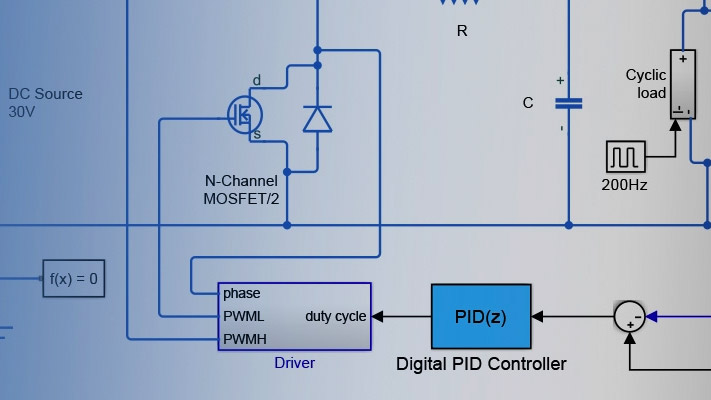
电气模型
电能由一个三相交流/直流二极管整流器连接到一个600v, 60hz的电网当量提供。直流母线连接到三相两电平变换器。这个转换器产生可变电压和频率所需的变速运行的150马力感应电机。此外,制动斩波器连接到直流母线,以耗散电机在减速过程中的动能。
根据应用程序、期望的性能和控制器设计的复杂性,可以通过各种技术来控制逆变馈感应电机驱动。常用的方案有标量控制(V/Hz控制或开环磁链控制)或矢量控制(磁场定向控制或直接转矩控制)。在我们的例子中,我们使用DTC技术与空间矢量脉宽调制(SVPWM)。
与传统的基于磁滞的直接转矩控制相比,SVPWM-DTC具有固定的开关频率。此外,该技术显著降低了电机在稳态运行时的转矩脉动。参考感应电机驱动的直接转矩控制示例,了解使用基于迟滞的直接转矩控制的电机驱动的转矩脉动。
SVPWM-Based直接转矩控制器
直接转矩控制是一种控制技术,它允许你以一种解耦的方式瞬间控制电机的磁通量和它的电磁转矩。控制力矩直接允许精确的静态和动态速度调节。
DTC子系统的主要组件是:
通过积分定子电压来估计磁通和扭矩计算 - 定子通量连接,并且基于估计的通量和电动机计算扭矩。
速度调节器 - 调节器将实际电机速度与速度参考进行比较,并产生扭矩参考。
磁通和转矩调节器-计算出的磁通大小和转矩与参考值相比较。产生的磁通和扭矩误差被馈送到反上发条PI调节器。磁链调节器的输出是直轴参考电压Vd_ref,转矩调节器的输出是正交轴参考电压Vq_ref。
缩放和变换- Vd_ref和Vq_ref缩放和变换为三相信号Vref,使用由磁通位置phi_pha给出的旋转坐标系参考。
DTC子系统的输出Vref被馈送到SVPWM调制器,该调制器向电机逆变器产生脉冲。
模拟
运行仿真并在Scope_Motor上观察波形。最初,通量参考被设置为0.9 V.s。
在0.1秒时,转速参考设定为1500rpm,电机开始加速。可以看到,电机的转速精确地遵循转速参考,其最大变化率限制在1200 RPM/s。1500 RPM设置点达到1.35秒。
在1.5秒,将500 n.m的负载扭矩施加到电动机上。DTC控制将电机速度保持在1500 rpm。
在2s时,负载转矩降低到50 N.m,在2.5s时,转速参考降低到500 RPM。观察范围供应,制动斩波器操作耗散了电机产生的动能,以避免直流母线上的过电压。
在3.5 s时,参考通量从0.9 v增加到1.0 v
实时模拟
如果您有Simulink金宝app实时和SpeedGoat目标,则可以实时运行此模型。
打开配置参数窗口(或按Ctrl + E.), 点击代码生成和集合系统目标文件来
slrealtime.tlc..连接到目标,在实时选项卡上,单击运行在目标.
然后,您的模型将自动构建,部署,并在目标上执行。根据您的目标流带宽,您可能必须将实时传输的信号数从目标从目标转移到主机。
参考
Cirrincione,M.,M.Pucci,G.Vitale。具有线性神经网络的电源转换器和AC电气驱动器。CRC Press,2012。
您也可以从以下列表中选择一个网站: